101复习(2`变换)
变换
- 仿射变换:
- 线性变换和平移变换的组合
- 包括:旋转,缩放,位移,翻转,切变, 反射,错切……
- 线性变换
- 缩放
- S1 * x, S2 * y, S3 * z
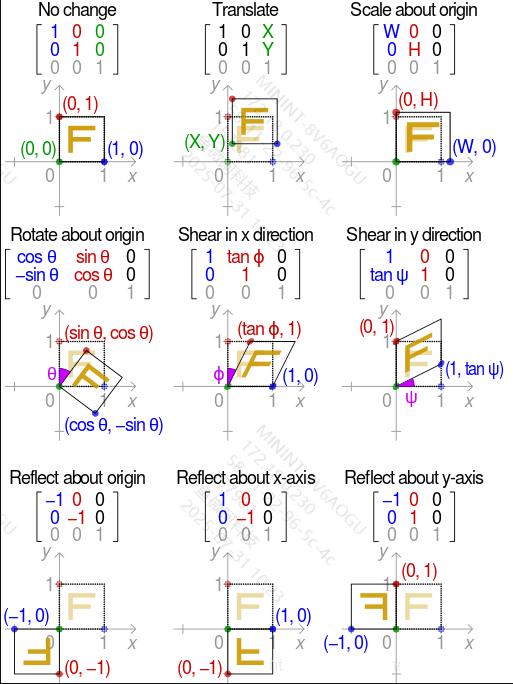
- 旋转
- 2D旋转矩阵推导(只能绕虚拟z轴旋转)
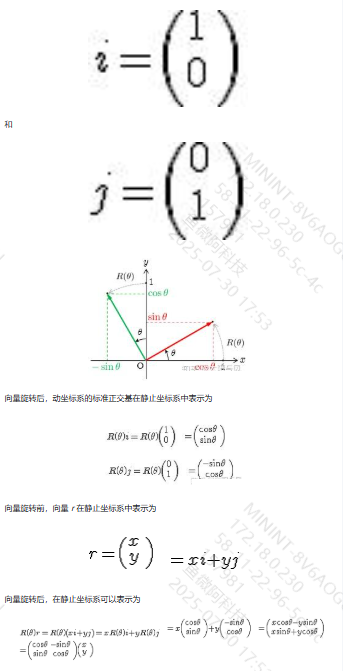
- 两个单位向量ij,旋转矩阵为R(θ)
- 用R(θ)旋转两个单位向量,根据三角函数得到旋转后的向量
- 向量r可以用ij表示
- 注意:图中cos(θ)sin(θ)并不是标注的虚线,是虚垂线点到原点的那段距离
- 问题:如果使用非单位向量例如(0,2),(2,0)去推导,是否R(θ)的结果不同
- R(θ) * (0,2) == 2 * R(θ) * (0,1),仍然可以利用单位向量推导,最后通过2缩放向量长度,这样R(θ)结构不变
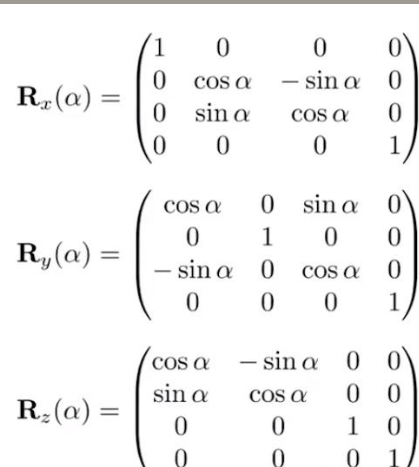
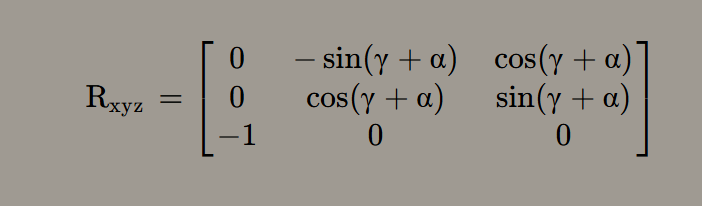
- 欧拉角——旋转算法:
- 欧拉角旋转算法将绕任意旋转轴旋转,分解三次旋转, 每次绕世界坐标系的一个轴旋转,根据一定顺序,例如:XYZ,ZXY,YXZ……

- 由于三次旋转变换也是矩阵表示,矩阵乘法不遵守交换率,因此不同的顺序会形成不同的复合旋转矩阵,上图是ZYX的顺序,欧拉角为α,β,γ的复合矩阵
- 其中三次旋转的角度pitch俯仰、Yaw偏航、Roll翻滚为欧拉角
- 3D旋转矩阵推导(可以绕无数个轴旋转)
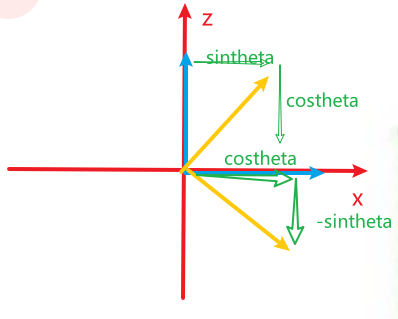
- 绕哪轴旋转哪轴值不变
- 根据右手螺旋定则建立2D坐标系:另外两个非旋转轴,按照xyz的优先级,从一个轴到另一个轴
- 绕 X 轴旋转时,Y 轴向右,Z 轴向上
- 绕 Z 轴旋转时,X 轴向右,Y 轴向上
- 绕 Y 轴旋转时,X 轴向右,Z 轴向上
- 确定旋转角度方向:从旋转轴正方向看的逆时针方向
- 旋转矩阵是正交矩阵
- Gimbal——船体陀螺仪:
- 由三层嵌套的圆环(每个圆环有2个连接头(相当于坐标轴)和内侧相连),旋转轴,转子(具有质量增加惯性)
- 当船体发生了摇晃,哪个圆环连接头线段 和旋转轴平行,则此圆环绕旋转轴旋转,如果有外环带动外环旋转,无论怎样摇晃,旋转轴永远和世界坐标系的y轴平行
- 作用:旋转轴永远和世界坐标系的y轴平行,作为定轴参考,可以实时测量船体的姿态,保证风浪中的稳定性
- Gimbal——万向节死锁:
- 当船体发生了剧烈摇晃,90°,某一个圆盘的连接头线段将和另一个连接头线段平行
- 例如,船体绕x旋转90°(中环旋转),外内连接头平行,这时绕z旋转,由于没有和旋转轴平行的连接头线段,则失去了自身调节能力,旋转轴不再和世界坐标系的y轴平行
- 本质:机械结构,内环旋转影响外环轴旋转,当旋转90/-90度时,发生轴重叠
- 船体问题:陀螺仪发生万向节死锁,导致船体测量功能短暂失灵
- 欧拉角——万向节死锁:
- 触发条件:当按照某种旋转顺序形成的复合矩阵,其中第二个欧拉角为±90度时,发生万向节死锁
- 结果:绕z旋转和绕x旋转是等效的(α,γ)(也可以想象为轴重叠),失去自由度(β)
- 误区:发生死锁并不意味着这种状态无法通过欧拉角表示出来,空间中的任何状态都能通过欧拉角变换得到,只是某些状态表示不唯一而已
- 影响:获得非预期结果
- 罗德里格斯——旋转算法

- n是旋转轴,a是旋转角度
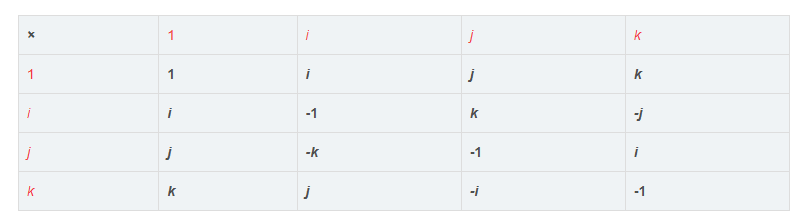
- 四元数——旋转算法
- 复数:a + bi(实数+虚数)
- 四元数:q = w + xi + yj + zk(复数的扩展),w实部,xi + yj + zk虚部,ijk为虚数单位
- 四元数表示:
- 复数式:w + xi + yj + zk
- 齐次形式:(w,x,y,z)/ (w,v)
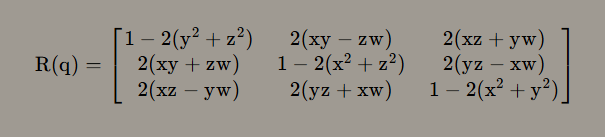
- 矩阵表示:
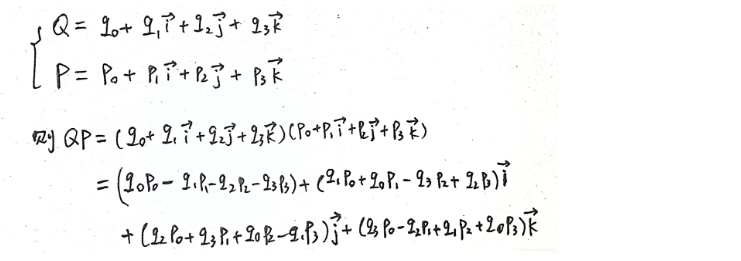
- 四元数运算:
- 乘法:得到一个新的四元数
- 乘法:得到一个新的四元数
- 四元数计算旋转:
- 定义旋转轴 v =(vx, vy, vz),旋转角度θ = 弧度制, 被旋转向量w = (wx, wy, wz)
- 表示四元数:q =(cosθ/2,sinθ/2 * vx,sinθ/2 * vy,sinθ/2 * vz)
- 表示四元数的共轭:q^-1 = (cosθ/2,-sinθ/2 * vx,-sinθ/2 * vy,-sinθ/2 * vz)
- 被旋转向量的四元数形式:qw = (0, wx, wy, wz) = 0 + wxi + wyj + wzk
- 应用旋转:qw` = q * qw * q^-1
- 新向量的四元数形式:qw` = (0, wx`, wy`, wz`) = 0 + wx`i + wy`j + wz`k
- 新向量非四元数形式:w` = (wx`, wy`, wz`);
- 欧拉角 vs 四元数:
- 欧拉角:
- 优点:直观;可表示>180度的旋转
- 缺点:万向节死锁,插值不平滑,旋转顺序重要性
- 四元数:
- 优点:计算效率高,解决万向节死锁, 插值平滑,内存消耗小
- 缺点:不直观,不可表示>180度的旋转
- 欧拉角:
- 缩放
- 平移变换
- 位移:
- x + L1, y + L2, z + L3
- 齐次坐标:为n维的点引入n+1个分量,值为1,使其支持平移变换
- 位移:
- 模型变换顺序
- SRT->TRSV
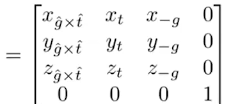
- 视图变换
- 摄像机由一个坐标系确定它的位置和旋转,其中原点e为摄像机位置,t对应up轴,g为lookat轴,t*g对应正交轴,轴方向为旋转方向
- 物体的每个点(x,y,z)应用摄像机的逆变换,即逆矩阵
- 平移:x + -ex, y + -ey, z + -ez
- 旋转: 先求出点到摄像机的变换,逆矩阵即反方向变换,其中逆矩阵==转置矩阵
- 投影变换
- 正交
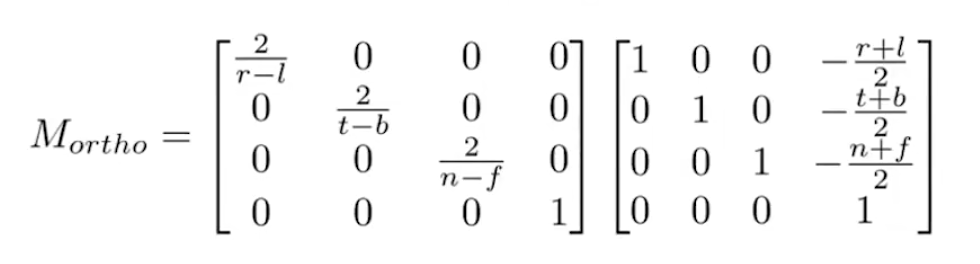
- 定义裁剪空间tblrnf
- 获取空间中心坐标,将空间中心对齐世界原点
- 压缩为标准立方体:一个数 * 它的倒数 = 1
- 透视
- 定义平截头体nf,垂直fov,水平fov(视野)
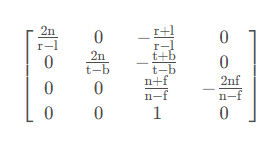
- 投影矩阵
- 投影矩阵推导
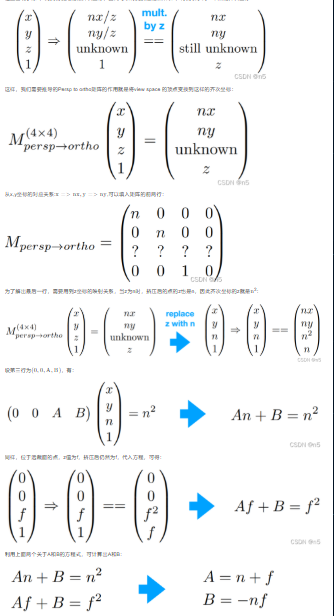
- 先从垂直视野的侧面看,由于相似三角形原理,对于空间中一点(x,y,z),连接原点和近平面交点(x`,y`,z`),y`/y = n/z(n即z`),同样对于水平视野的顶部看,x`/x = n/z
- 可以得知空间中一点在x和y方向,被挤压后的位置,
- 由于为了接下来计算方便,让每个分量*z
- 可以得知投影矩阵的前两行,和第四行
- 我们知道当z==n时,挤压后仍然为n,由于刚才每个分量*z,这里n * z即n^2,同样对于远平面上的一点,挤压后仍为f,f * z即f^2
- 设第3行为00AB,由于和xy无关前两个元素为0,近平面点应用变换后得到n^2(为了今后/w透视除法时统一),根据2元1次方程组可以解得值
- 正交矩阵……如上
- 变换到-w——w的齐次裁剪空间
- 正交
- 透视除法:
- 由于上述*z简化操作,获得-w——w的裁剪空间,我们应/w也就是/z,这样变换到NDC空间
- 视口变换
- 屏幕分辨率:像素多少
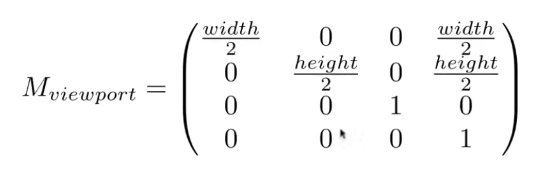
- z不变,因为我们只关心xy在屏幕空间的坐标,乘法将-1——1拉伸到宽高,加法使得左下角对齐坐标原点,变为屏幕空间
- 空间变换:
- 局部空间 -> M(SRT) -> 世界空间 -> V -> 观察空间 -> P -> 裁剪空间 -> /w -> NDC空间 -> 视口变换 -> 屏幕空间
- 真实步骤(以上有些步骤为了方便理解,有说的不准确的地方)
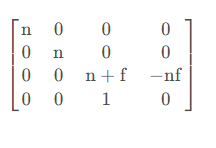
- 透视矩阵(带入法):xyz均匀放大,转换为齐次形式,齐次空间
- 正交矩阵:均匀压缩齐次空间
- /w:对于zview越大,xy越小(近大远小),近平面点不变*n/n,对于z,物体非线性的靠近f(非线性深度)
- -w——w的空间,w = -zview,那这个zview使用的哪个点的zview?每个点的zview,-w——w是针对每个点的空间
本文由作者按照 CC BY 4.0 进行授权