Vulkan复习(优化2)
顶点数据描述
- 之前顶点数据直接放在shader中,现在我们要定义在cpp中,传入到shader中
- 流程:
- 顶点数据:将3个顶点的位置和颜色数据存放在数组中,每个元素都是Vertex自定义类型
- VkVertexInputBindingDescription顶点输入绑定,包含绑定编号,字节间隔,顶点属性寻址是依赖于逐顶点还是逐实例
- VkVertexInputAttributeDescription顶点输入属性描述,包含数据的绑定编号,着色器输入位置编号,数据的尺寸和类型,相对于顶点输入绑定的元素起始位置的字节偏移量(通过offsetof(class 类型,类成员),获取成员的偏移量)
- VkPipeline:在VkPipelineVertexInputStateCreateInfo中,为vertexBindingDescriptionCount,vertexAttributeDescriptionCount设置数量和数据
- shader:把vs中定义的顶点数据删除,改为layout(location = index) in 从外部输入
VkBuffer、VkDeviceMemory
- VkDeviceMemory物理设备内存:从GPU的memoryHeaps上分配的内存,数据(顶点,索引,uniform,纹理)的实际存储位置,抽象出来让我们自己定义分配策略
- VkBuffer缓冲:GPU上分配的内存的关联绑定(包装),以及指定此内存的相关描述(使用方式,共享模式)
- 流程:
- 初始化:
- 创建VkBuffer:VkBufferCreateInfo,包含缓冲区的大小(以字节为单位),指定缓冲区的允许使用方式(VK_BUFFER_USAGE_VERTEX_BUFFER_BIT缓冲区用于vkCmdBindVertexBuffers),指定当多个队列家族访问缓冲区时的共享模式(独占 / 共享),vkCreateBuffer创建缓冲区
- VkMemoryRequirements内存需求,包含所需内存量的大小(根据VkBuffer使用vkGetBufferMemoryRequirements获取),以字节为单位,缓冲在已分配的内存区域中开始的字节偏移量,需求的内存类型
- 分配VkDeviceMemory:
- VkMemoryAllocateInfo内存分配,包含
- 分配的字节数为VkMemoryRequirements的大小,
- 从VkMemoryRequirements获取内存类型索引(vkGetPhysicalDeviceMemoryProperties获取物理设备所有内存属性(返回结果结构体包含两个数组 memoryTypes 和 memoryHeaps这个内存用来存放数据分为不同的内存类型,目前只关心memoryTypes),检查Requirements的内存类型索引,和是否有VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT主机访问标志以便CPU可以写入(比如memcpy),如果有返回对应索引)
- vkAllocateMemory创建内存
- VkMemoryAllocateInfo内存分配,包含
- 关联:vkBindBufferMemory将VkBuffer和VkDeviceMemory绑定,关联起来
- 填充VkDeviceMemory:vkMapMemory将GPU内存映射到CPU的地址空间,让CPU能够直接读写这块内存(下面将称为映射内存)中,vkUnmapMemory取消映射,内部通过memcpy将顶点数据填充到GPU上分配的内存中
- 要注意:驱动程序可能不会立即将数据复制到缓冲内存中,导致内存中不可见,解决问题分为两种办法:
- 内存类型VK_MEMORY_PROPERTY_HOST_COHERENT_BIT内存类型,这可能导致比显式刷新稍差的性能
- 在写入映射的内存后调用 vkFlushMappedMemoryRanges,在从映射的内存读取之前调用 vkInvalidateMappedMemoryRanges
- 每帧:
- 绑定:在recordCommandBuffer中,vkCmdBindVertexBuffers绑定顶点缓冲
- drawcall中,使用顶点数据的大小
- 销毁:vkDestroyBuffer,vkFreeMemory
- 初始化:
暂存缓冲区
- 此标记VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT的内存可以被CPU写入,但是GPU读取会较慢,此标记VK_MEMORY_PROPERTY_DEVICE_LOCAL_BIT的内存不可被被CPU写入,但是GPU读取会较快,因此我们首先创建HOST_VISIBLE的CommandBuffer,然后将vertex数据写入,然后将数据copy到DEVICE_LOCAL的CommandBuffer中,以便被GPU快速读取
- 缓冲区复制命令需要支持传输操作的queueFamily,任何具有 VK_QUEUE_GRAPHICS_BIT 或 VK_QUEUE_COMPUTE_BIT 功能的queueFamily,都已经隐式支持 VK_QUEUE_TRANSFER_BIT
- 流程:
- 初始化:
- 先创建staging暂存的VkBuffer和VkDeviceMemory,它的flag包括之前使用的VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT和VK_MEMORY_PROPERTY_HOST_COHERENT_BIT,还要新增VK_BUFFER_USAGE_TRANSFER_SRC_BIT源,最后将vertex数据存储在staging的Memory中
再创建非staging的VkBuffer和VkDeviceMemory,有VK_BUFFER_USAGE_TRANSFER_DST_BIT VK_BUFFER_USAGE_VERTEX_BUFFER_BIT, VK_MEMORY_PROPERTY_DEVICE_LOCAL_BIT标志 - 拷贝buffer:
- 创建新的CommandBuffer,和之前一样使用VkCommandBuffer调用vkAllocateCommandBuffers
- vkBeginCommandBuffer,调用vkCmdCopyBuffer,大小指定为vertex数据的大小
- 此命令需要提交到queue上执行,vkQueueSubmit,info中也要引用CommandBuffer
- 销毁:使用完staging版本的,和CommandBuffer,就可以立即销毁了
- 初始化:
索引缓冲
- 现在绘制矩形,顶点需要6个,可以用索引缓冲解决这个问题,现在需要4个顶点
- 流程:
- 初始化:
- 修改vertex数据,新建indices数据
- 新建indices的VkBuffer和VkDeviceMemory,和vertex一致,不同点就是数据的改变
- 在recordCommandBuffer中和vertex一样,也要vkCmdBindIndexBuffer绑定缓冲
- 销毁:vkDestroyBuffer,vkFreeMemory
- 初始化:
VkDescriptorSetLayout
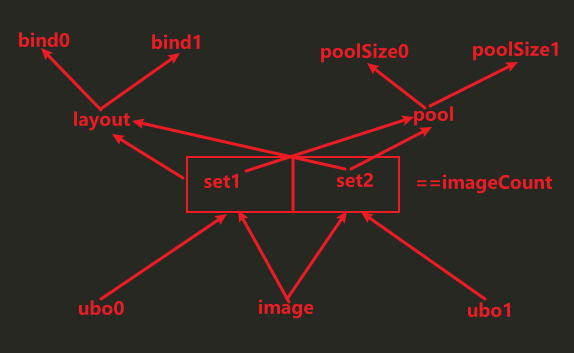
- VkDescriptorSetLayout描述符集布局:用于描述为set分配的数据,类型和数量,它的索引和shader对应
- 和VBO/IBO不同,uniform数据是动态数据(意味着会被CPU写入),CPU写入GPU读取,多线程同时读写同一数据,造成数据竞争,访问到不正确的结果,解决办法:UBO和set需要数组形式,其元素数量和swapchain的image数量一致,以便不同帧访问各自的数据
- 流程:
- 初始化:
- 定义uniform数据,MVP矩阵,并填充数据(glm库函数,以及std::chrono可以随时间更新)
- 和VBO和IBO一样创建VkBuffer、VkDeviceMemory用于存储uniform数据,vkMapMemory启用映射,并填充数据
- VkDescriptorSetLayoutBinding,包含在shader中对应的绑定点index,描述符数量(此绑定点有多少同类型对象,以数组为单位,即数组的元素数量为多少),描述符的类型(我们使用uniform缓冲区),采样器,指定哪个管线着色器阶段可以访问此资源(位掩码,我们在vs阶段),VkDescriptorSetLayoutCreateInfo,包含VkDescriptorSetLayoutBinding的数量和引用,vkCreateDescriptorSetLayout
- pipline的VkPipelineLayoutCreateInfo中,DescriptorLayout的数量和引用
- vs中:layout(binding = 0) uniform 传入数据,gl_Position应用MVP矩阵
- 每帧:memcpy填充数据
- 销毁:vkDestroyDescriptorSetLayout,vkDestroyBuffer,vkFreeMemory
- 初始化:
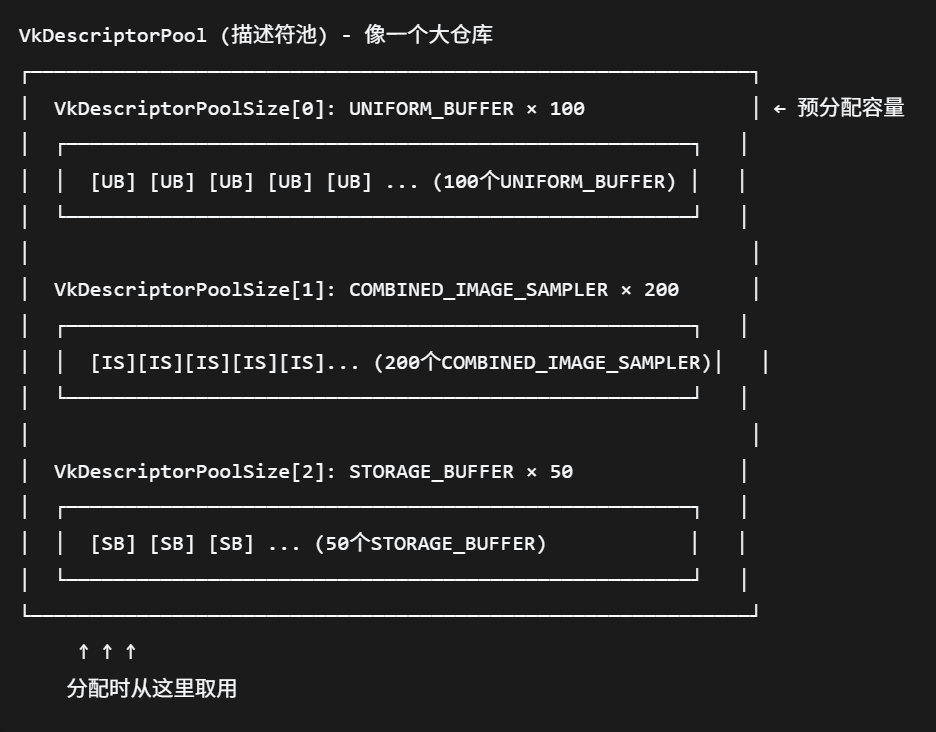
VkDescriptorPool、VkDescriptorSet
- VkDescriptorPool描述符池:用于分配VkDescriptorSet,相当于内存池
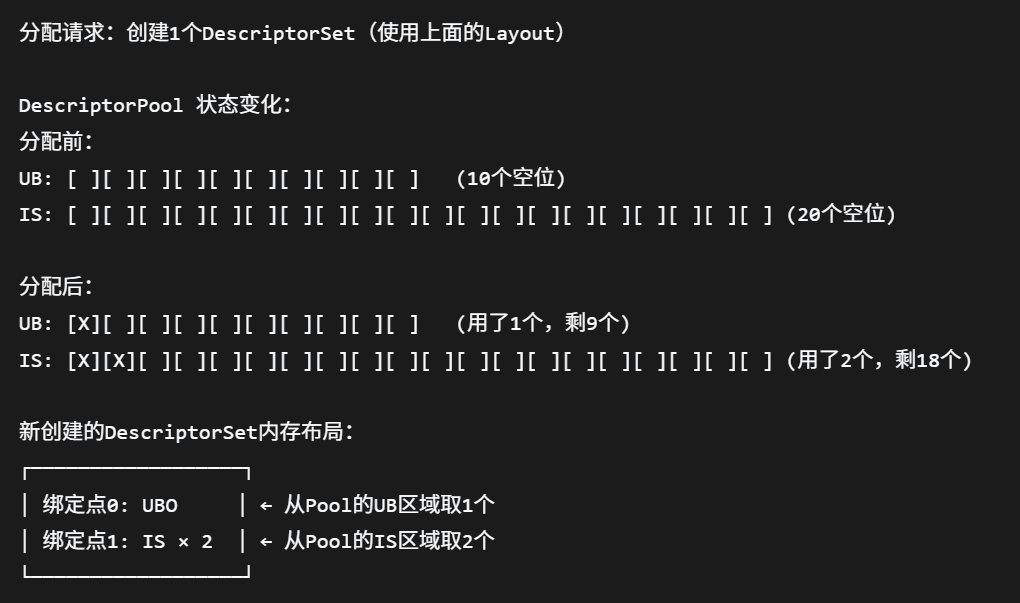
- VkDescriptorSet描述符集:需要从DescriptorPool分配,会关联layout
- 流程:
- 初始化:
- 内存对齐:
- c++自动应用默认内存对齐,可能不符合vulkan内存对齐的要求
- vulkan内存对齐要求:标量需要按照4字节对齐,vec2需要按照8字节对齐,vec3/vec4/mat4需要按照16字节对齐
- 解决方式
- 在struct成员中,使用alignas(x)来手动控制成员按照x字节对齐
- 也可以#define GLM_FORCE_DEFAULT_ALIGNED_GENTYPES,这样就不必考虑这些对齐要求
- VkDescriptorPoolSize,
- 用于描述从pool为哪些类型分配多少描述符
- 包含 描述符数量(此类型分配的描述符数量),VkDescriptorPoolCreateInfo,包含VkDescriptorPoolSize数量和引用,从池中分配的最大VkDescriptorSet数量,vkCreateDescriptorPool
- VkDescriptorSetAllocateInfo,包含VkDescriptorPool的引用,从VkDescriptorPool分配的VkDescriptorSet的数量,VkDescriptorSetLayout引用,vkAllocateDescriptorSets分配
- VkDescriptorBufferInfo,包含VkBuffer引用(每个set关联各自对应的buffer),偏移量,数据大小,VkWriteDescriptorSet,包含要更新的VkDescriptorSet,描述符集中的描述符的index,绑定内的起始字节偏移量,描述符类型,描述符数量(此set对应的数量),VkDescriptorBufferInfo的引用,vkUpdateDescriptorSets将buffer和set绑定
- 内存对齐:
- 每帧:vkCmdBindDescriptorSets
- 销毁:vkDestroyDescriptorPool
- 初始化:
VkImage、VkImageMemoryBarrier
- VkImage图像:之前它是由swapchain自动创建的,现在我们自己创建,它和VkBuffer很相似,不同的是它用于纹理,也是需要bind关联memory
- VkImageMemoryBarrier屏障:图像布局转换最常见的方法之一是使用Barrier,并且Barrier也属于同步原语之一,具有同步对资源的访问作用(比如读写)
- 和ubo数据不同,它不是动态数据,是一张不变的纹理,因此不会写入,也就不会数据竞争,所以只用创建1个不用创建image数量个
- 流程:
- 导入stb_image库,并包含头文件
- 初始化:
- 加载数据:通过stb_image库加载纹理资源,它将返回unsigned char类型数组,以及纹理宽高和通道,使用完数据后,要stbi_image_free释放数组内存
- staging:依旧先创建staging的VkBuffer、VkDeviceMemory,把获取的数据填入
- VkImage:VkImageCreateInfo,包含
- 图像类型(将以哪种坐标系寻址,分为1D2D3D),
- 尺寸(宽高的纹素数量,深度),
- mipmap数量,
- 图像中的层数,
- 格式(应与VkBuffer一样的格式,否则copy失败),
- 纹理单元块(纹素)的排列方式(VK_IMAGE_TILING_LINEAR线性贴图(数组),CPU读写方便(手动填充memory数据而非memcpy,就像操作数组一样),GPU访问效率低(shader采样,渲染目标写入,显示器读取……),VK_IMAGE_TILING_OPTIMAL最优平铺,CPU读写不方便(可能为块状排列,压缩格式,交错排列……),GPU更高效的内存访问),
- initialLayout 指定了图像所有子资源的初始 VkImageLayout
- 图像的预期用途(图像的布局),
- 每个纹理单元的采样数,
- 被多个队列家族访问时的共享模式,
- vkCreateImage(虽然也可以让shader访问buffer中的值,但image可以使用2D坐标更快的访问)
- Memory:vkAllocateMemory分配内存,之前VkBuffer+Memory,现在VkImage+Memory,两个缓冲之间需要copy(虽然也可以创建staging image,但从buffer->image的方式在某些硬件上更快),但是在其copy前后需要建立Barrier
- transitionImageLayout图像布局转换:
- VkImageMemoryBarrier,包含
- 源布局,
- 目标布局,
- 如果你使用屏障来传输队列族所有权,QueueFamilyIndex应为队列族的索引,如果不想这样做,应指定默认值VK_QUEUE_FAMILY_IGNORED,
- 受此barrier影响的VkImage句柄
- 受此barrier影响的图像的特定部分
- 数据(颜色,深度,模板……)
- mipmap级别(第一个可访问的)和数量(从此级别开始算)
- 层级别(图像数组会使用)和数量
- 访问掩码(我们还要关心资源的同步问题,在第一次transition前不需要等待任何操作,第二次read需要等待write操作完成)
- 命令:
- vkBeginCommandBuffer,
- vkCmdPipelineBarrier布局转换,包含VkImageMemoryBarrier的引用(这里还需要同步具体阶段,第一次不需要任何等待即可传输,第二次需要等待传输完成才能被shader读取)
- vkEndCommandBuffer
- Submit
- 我们将应用两次转换,第一次在copy前,layout转换为TRANSFER_DST,第二次在copy后,layout转换为SHADER_READ
- VkImageMemoryBarrier,包含
- copy:
- VkBufferImageCopy,包含
- 像素值开始的缓冲区中的字节偏移量,
- bufferRowLength 和 bufferImageHeight像素在内存中的布局方式,
- imageSubresource:imageOffset和imageExtent字段指示我们要将像素复制到图像的哪一部分,
- vkBeginCommandBuffer,
- vkCmdCopyBufferToImage此操作会将数据从stagingMemory拷贝到ImageMemory,
- vkEndCommandBuffer,
- Submit
- VkBufferImageCopy,包含
- 销毁:vkDestroyImage,vkFreeMemory
VkImageView、VkSampler
- VkImageSampler图像采样器:用于从VkImage采样颜色
- 流程:
- 初始化:
- PhysicalDevice:在选择合适的PhysicalDevice时,应该保证支持的Features中支持samplerAnisotropy采样
- LogicalDevice:deviceFeatures.samplerAnisotropy = VK_TRUE;控制PhysicalDevice的采样功能启用
- VkSamplerCreateInfo,包含放大、缩小时的过滤算法,UVW坐标在 [0,1) 范围外的寻址模式,是否启用各向异性过滤,使用的各向异性值限制,预定义边框颜色,是否使用归一化纹理坐标来寻址图像的纹理单元,是否在查找过程中与参考值的比较,指定比较运算符,指定应用于查找的mipmap滤波器,vkCreateSampler
- 将之前创建VkImageView的部分抽象出来封装到函数中
- 销毁:vkDestroySampler、vkDestroyImageView
- 初始化:
VkDescriptorSet
- 流程:
- 初始化:
- 顶点数据,新增纹理坐标,VkVertexInputAttributeDescription中新增绑定location
- VkDescriptorSetLayoutCreateInfo新增VkDescriptorSetLayoutBinding绑定(绑定点为1(之前ubo数据为0),描述符数量1,类型为图像采样,采样器为空,阶段标志为fs阶段),绑定点数量变为数组元素数2
- VkDescriptorPool新增VkDescriptorPoolSize(描述符数量依旧==image数量,因为不是数组形式),修改PoolSize的数量和数据引用
- 新增VkDescriptorImageInfo(之前是VkDescriptorBufferInfo),关联VkImageView(之前descriptor和buffer关联,现在和image的包装imageview关联)、VkSampler
- 新增VkWriteDescriptorSet(绑定点改为1,描述符类型图像采样,引用VkDescriptorImageInfo)
- vs:layout(location = 2)新增布局,并把它out输出给fs
- fs:layout(binding = 1) uniform sampler2D新增纹理传入,和in接收vs的输出,颜色值从texture采样
- 初始化:
深度测试
- 流程:
- 初始化:
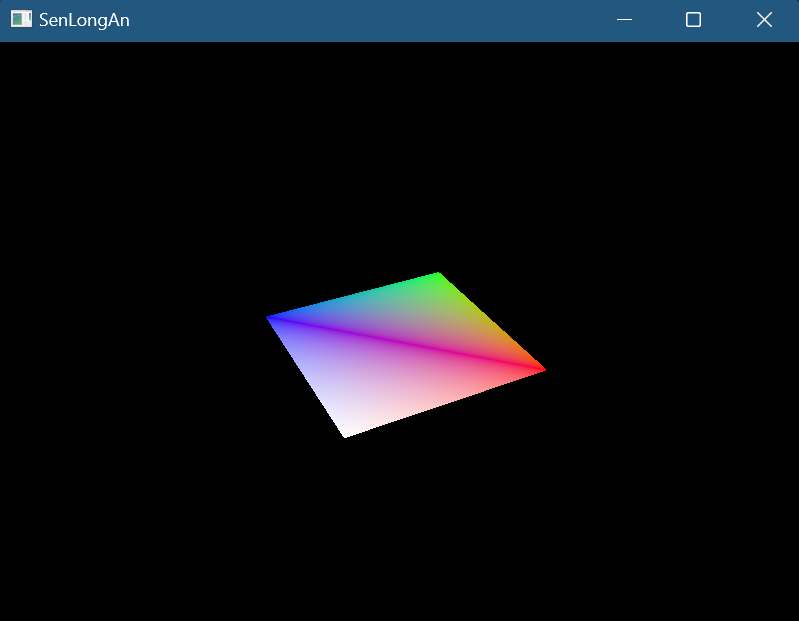
- 修改测试场景:顶点、索引数据:我们创建两个具有前后关系(z值不同)的quad作为测试场景
- 创建附件:
- VkImage(对于格式获取物理设备支持的格式特性,如果候选格式中支持需要的特定则选择它,纹理单元排列方式OPTIMAL因为不需要手动按纹素填充数据),Memory(CPU不需要memcpy而是由GPU深测阶段填充,因此memory类型是VK_MEMORY_PROPERTY_DEVICE_LOCAL_BIT对GPU访问进行了优化),最后将image和memory绑定
- 为image创建ImageView,格式和image一致,指定图像的哪些方面包含在视图中(此处为深度)
- framebuffer:需要把新的imageview作为framebuffer的attachment的一部分
- 创建附件描述:
- 新增VkAttachmentDescription深度附件描述,和color不同的是,深度数据不需要呈现,因此pipline使用后不需要保留数据,因此storeOp可以指定dont care,把这个附件添加到VkRenderPassCreateInfo中
- 为subpass新增VkAttachmentReference
- 修改VkSubpassDependency,这里我们只创建了一个image,因此在dependency中应该等待之前的所有subpass深度写入完成
- 设置深度测试的状态:
- Pipeline中VkPipelineDepthStencilStateCreateInfo,设置为启用和测试方式
- vs:把顶点属性的ve2变为ve3
- 每帧:新增深度的VkClearValue
- 销毁:vkDestroyImageView、vkDestroyImage、vkFreeMemory
- 初始化:
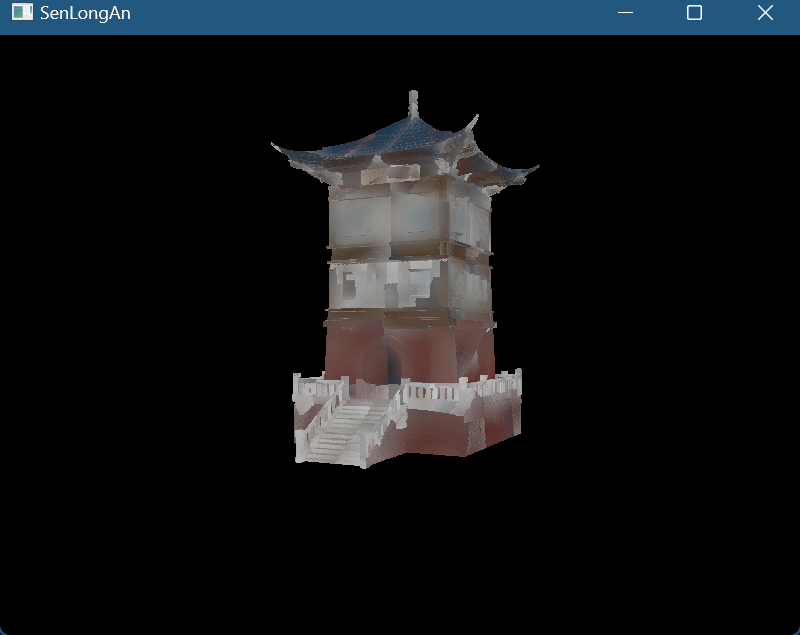
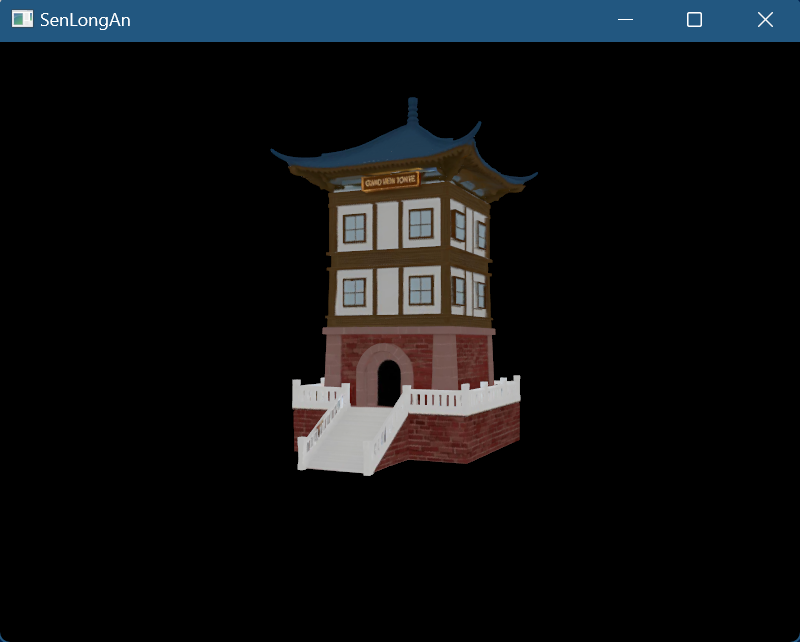
加载模型
- 流程:
- 初始化:
- 我们将使用 tinyobjloader 库,加载obj文件,LoadObj获取数据,通过遍历范围值,将获得Vertex数据(pos,纹理坐标)和indices数据,把之前场景使用的顶点数据删除就好
- 渲染模型和渲染自定义的网格体,没什么差异,其实就是改一下使用的顶点数据
- 注意我们使用glm是,S*R*T*V的顺序
- 初始化:
mipmap
- 流程:
- 初始化:
- 为纹理生成mipmap:
- mipLevels级别取决于原分辨率的大小,新生成的个数为log2 ^max(width, height),再加上原图像即+1
- 创建staging buffer:依旧把纹理数据存储在staging memory中
- 创建image和memory:
- 创建image时,应指定mipLevel数量(创建mipLevel数量个image),usage需要新增TRANSFER_SRC(因为要根据它们创建下一级别的image)
- memory会根据image的Requirements请求内存,因此和image的miplevel数量一致
- 布局转换:第一次transitionImageLayout图像布局转换时(转换为TRANSFER_DST),也应指定mipLevel数量(这里把所有level图像都转为了dst)
- copy数据:然后正常执行copy操作(VkBuffer+Memory -> VkImage+Memory),这里mipLevel指定为0(表示仅copy数据到第0层mipmap)
- 不需要第二次图像布局转换(转换为SHADER_READ)
- 生成mipmap:
- 根据图像format从物理设备获取属性看是否支持采样
- beginCommandBuffer:
- for循环中:
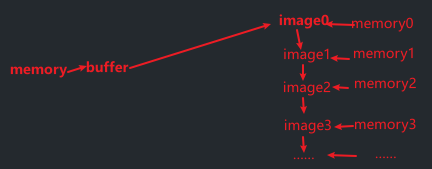
- 按照下面方式循环mipLevels - 1次(对于image0,已经从buffer copy数据了,也就是从image1开始,到最后一个image,每次对于imagei先把前一个imagei-1布局转换为TRANSFER_SRC,然后传输数据到imagei,然后再把imagei-1布局转换为SHADER_READ_ONLY,以便可被shader读取,最后要把最后一个image也转换SHADER_READ_ONLY布局)
- 使用Barrier进行布局转换,其中mipmap levelCount可访问的数量为1,baseMipLevel开始层为i-1
- 同步:
- 第一次布局转换:等待之前传输写入完成,才能进行传输读取
- 第二次布局转换:等待传输读取完成,才能被shader读取
- VkImageBlit
- Offsets:源区域范围(分辨率),目标区域范围(分辨率)
- 源子资源:数据为颜色,mipmaplevel 为i-1,层为0
- 源子资源:数据为颜色,mipmaplevel 为i,层为0
- vkCmdBlitImage,源图像和布局,目标图像和布局,VkImageBlit引用,缩放时应用的过滤器(线性过滤)
- EndCommandBuffer
- createTextureImageView:要指定mipmap的levelCount
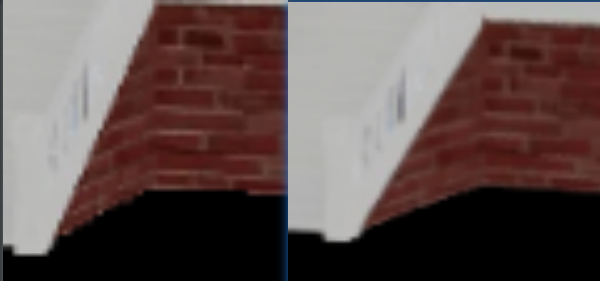
- VkSampler:
- 限制计算出的LOD值(Level of Details多细节层次:根据模型的节点在显示环境中所处的位置(Screen Size)和重要度,来决定物体渲染的资源分配)的最小值和最大值(如果不想限制最大值,将指定为VK_LOD_CLAMP_NONE),
- 添加到 mipmapLOD计算中的偏移量
- 我们可以修改minLod来观察纹理lod的效果
- 为纹理生成mipmap:
- 初始化:
多重采样
- 我们要在原来的swapchain上多采样渲染,最后应该还原为1采样点,所以要创建新的image,底层会为我们自动转换
- 流程:
- 初始化:
- 查询采样数量:获取PhysicalDeviceProperties,对于颜色采样数量和深度采样数量,取共有标志(位掩码),如果共同拥有某采样点数量的支持则选择(此处选用最大支持数量,因为具体采样数量是由Pipeline中设置的)
- 创建新的附件:创建image和memory,和image view,Framebuffer中新增这个imageView
- 附件描述:
- RenderPass中,让colorAttachment和depthAttachment的samples数量修改为现用数量,把此colorAttachment的finalLayout改为COLOR_ATTACHMENT(因为它不再需要直接呈现)
- 新增附件描述,samples数量为1,finalLayout为PRESENT_SRC,把此附件添加到VkRenderPassCreateInfo中,并在VkSubpassDescription中新增此附件
- Pipeline中:把VkPipelineMultisampleStateCreateInfo的rasterizationSamples数量修改现用数量,我们可以启用样本着色sampleShadingEnable,和设置样本着色的最小分数minSampleShading,来产生更好的效果(内部的高对比度颜色)
- 销毁:vkDestroyImageView,vkDestroyImage,vkFreeMemory
- 初始化:
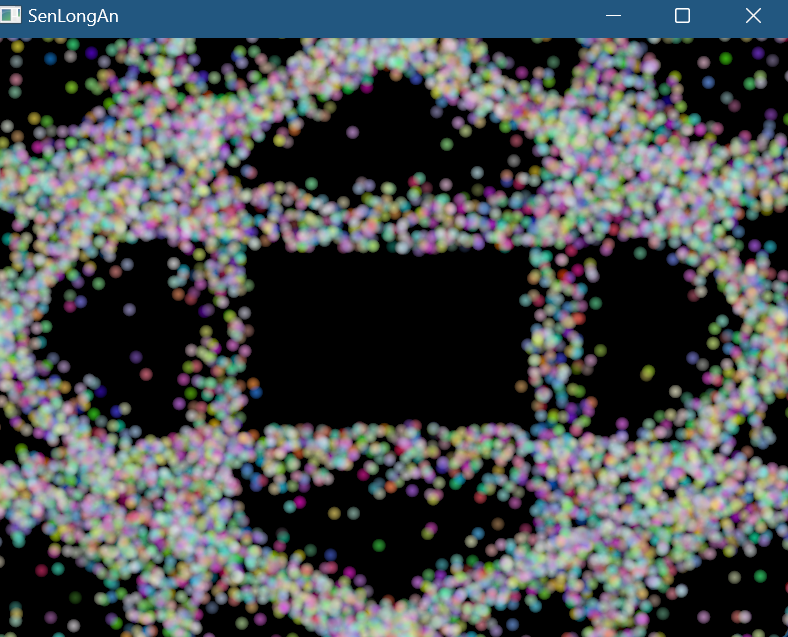
粒子
- CS计算着色器:
- 位置:不属于图形管线的一部分,是独立运行的,
- 作用:可以让GPU进行计算工作,包括图像处理、可见性测试、后期处理、高级光照计算、动画、物理,也包括非图形计算工作
- 优势:GPU硬件高度并行特性使得非常适合做密集型计算(拥有数万个小型计算单元,而CPU只有几个大型计算单元),并且不需要数据从CPU传输到GPU的消耗性能的操作,所有的数据都存储在GPU
- 粒子:
- 通常有数千个组成,传统方法是将粒子的顶点数据存储到CPU内存中,再传输到GPU的内存中,然后每帧使用CPU更新它们,再次传输到GPU的内存中,以便显示更新后的粒子,这个传输操作非常昂贵
- 如果基于GPU,我们只需要首次传输,之后的更新都在GPU的CS中完成,这样就不必每帧从CPU传输数据
- CS像其他shader一样也可以处理数据和图像:
- 和vs有顶点缓冲一样(通常称为vbo顶点缓冲对象),cs也有存储缓冲(通常称为SSBO着色器存储缓冲对象)
- 数据依旧使用VkBuffer包装,为了让它用于cs的存储缓冲,需要添加标志VK_BUFFER_USAGE_STORAGE_BUFFER_BIT,shader中使用layout(std140, binding = 2) buffer,可以像数组一样读取和写入,readonly和writeonly限定符,std140内存布局限定符,它确定成员元素在内存中如何对齐,这是CPU和GPU内存映射必须的
- VkImage添加标志,VK_IMAGE_USAGE_STORAGE_BIT,shader中计算着色器中使用imageLoad和imageStore完成存储图像的读取和写入
- 流程:
- 初始化:
- PhysicalDevice选择和queue:
- 选择支持compute QueueFamilies的PhysicalDevice,新增QueueFamilies的VK_QUEUE_COMPUTE_BIT标志的判断
- 除了之前的graphics和present,还要根据QueueFamilies index从device获取compute queue
- particle数据:
- 创建9000个粒子,使用random伪随机生成particle数据(2D位置,速度,颜色)
- 创建VkBuffer和memory:
- 注:这里particle数据被buffer包装后,particle数据既可以作为顶点数据存储在vbo中,又可以作为存储数据存储在ssbo中
- 依旧先创建staging的VkBuffer(VK_MEMORY_PROPERTY_HOST_VISIBLE_BIT以便可以将数据从CPU写入,TRANSFER_SRC传输源)和memory,particle数据填充到memory
- 创建当前的VkBuffer和memory(VK_BUFFER_USAGE_VERTEX_BUFFER_BIT用于vs的vbo、 VK_BUFFER_USAGE_STORAGE_BUFFER_BIT用于cs的ssbo、另外VK_BUFFER_USAGE_TRANSFER_DST_BIT用于从staging传入数据,
- 注意当前的VkBuffer和memory个数要为2个(当前帧和上一帧)
- copy数据,两个buffer都要拷贝
- Vertex
- 描述:particle数据作为顶点数据时,需要创建BindingDescription和AttributeDescription,对于velocity不用添加到描述中,因为它仅供cs使用
- graphic Pipeline:VkPipelineVertexInputStateCreateInfo中依旧绑定Description
- 每帧:vkCmdBindVertexBuffers绑定上面创建的VkBuffer
- uniform数据
- 创建:VkBuffer(UNIFORM_BUFFER用于ubo,HOST_VISIBLE可以被主机CPU写入)和memory,只进行vkMapMemory内存映射,填充数据放在每帧中进行
- 数据成员:deltaTime
- 每帧:
- 计算新数据:glfw获取cur time - last time
- memcpy更新ubo
- Descriptor:
- 注:我们的ssbo、ubo都要使用descriptor
- Layout:要创建3个bind(一个ubo,两个SSBO当前帧和上一帧),描述类型(ubo、ssbo),着色器访问阶段(cs)
- Pool:有两个poolsize,第一个是ubo,第二个storage存储数据,描述符数量要*2(当前帧和上一帧)
- set:创建3个VkWriteDescriptorSet,以便将ubo、ssbo和set绑定
- 注:
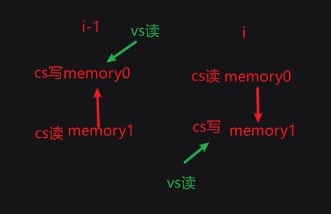
- set0绑定buffer1,buffer0,set1绑定buffer0,buffer1,这样就可以cs的ping pong交换数据,第i-1帧使用set0利用buffer1计算新数据到buffer0,第i帧使用set1利用buffer0计算新数据到buffer1
- cs中修改的memory的数据,由于和vbo使用同一buffer,所以:
- vkCmdBindVertexBuffers(commandBuffer, 0, 1, &shaderStorageBuffers[currentFrame], offsets);
- 每帧会读取到新的数据(GPU修改顶点数据),由于currentFrame每帧更新,读取0,1,0,1……正好和上面对应
- Compute Pipeline:
- 创建VkShaderModule,和VkPipelineShaderStageCreateInfo,和之前差不多,只需要改stage为computer
- VkPipelineLayoutCreateInfo,引用VkDescriptorSetLayout
- vkCreateComputePipelines而不是vkCreateGraphicsPipelines
- cs:
- 工作组workload:抽象为3维模型,将所有工作任务组成workload,每个workload都执行相同的调用集合,它们可以并行,维度在cs中设置
- 调用invocation:
- layout (local_size_x = 256, local_size_y = 1, local_size_z = 1) in;(由于是一维数据,因此只需要工作组的x维度)
- 接收3组数据,根据输入的上一帧粒子SSBO数据 + 速度(矢量)*时间 来更新位置输出到当前帧SSBO
- 如果粒子到达屏幕边界,速度方向就反向
- vs:接收顶点位置和颜色,gl_PointSize设置顶点大小,gl_Position输出顶点位置
- fs:接收vs out的颜色,输出
- computer CommandBuffer:从command pool分配computer CommandBuffer,和graphic CommandBuffer一样数量
- computer同步原语:创建computer的Semaphores和fence
- graphic Pipeline:
- AssemblyState的topology从TRIANGLE变为POINT
- DepthStencilState删除,不需要深度测试了
- 由于graphic不需要使用ubo,因此pipelineLayout更新为空
- PhysicalDevice选择和queue:
- 每帧
- computer部分:(不需要acquire)record(bind computePipeline,BindDescriptorSets,vkCmdDispatch让cs开始计算)->Submit(不需要present)
- 同步:
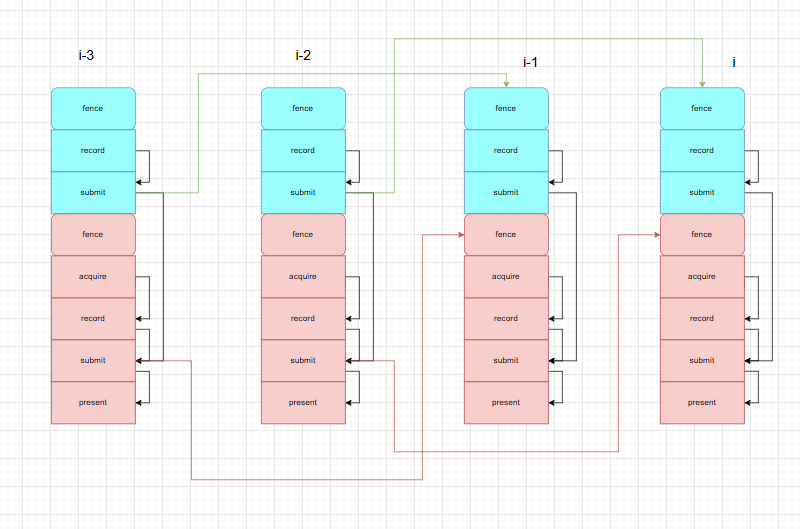
- 允许多帧并行(三缓冲下2帧并行),graphic和computer分开,对于第i帧,如果i-2帧的computer完成,就可以执行当前computer
- 对于单帧:按序执行,graphic需要在computer后
- 初始化:
本文由作者按照 CC BY 4.0 进行授权