OpenGL复习(语法,面剔除,cubemap,gs,SSAO)
语法
- 顶点数据设置
- VBO:管理顶点数据,一遍一次性发送到GPU显存中
- 链接和布局:指定哪部分数据对应着色器中哪个顶点属性
- glVertexAttribPointer(GLuint index, GLint size, GLenum type, GLboolean normalized, GLsizei stride, const void* pointer);
- glVertexAttribPointer(顶点属性的索引(和shader中对应),分量数量(1/2/3/4维),分量数据类型,是否归一化,步长,起始位置偏移);
- VAO:将顶点数据和链接方式组合,渲染时只需要绑定VAO,而不需要再次填充和布局
- EBO/IBO:简化顶点数据的重复定义,通过顶点索引来组合图元,同样也可以被VAO绑定
- IO读取shader文件内容,存放在string对象中,通过c_str转换C风格字符串(常量字符数组)
- 缓冲区操作
- glBufferSubData,和将数据填充到整个缓冲(GPU显存)不同,它填充缓冲的特定区域,它需要提供一个偏移量,指定从何处开始填充,这样顶点数据不用交错布局,可以采用分批布局,还需要调整之前的布局方式
- glCopyBufferSubData将一个缓冲的内容拷贝到另一个缓冲
- 以gl_为前缀的是GLSL的内建变量:
- gl_PointSize图元设置为点并控制它的大小,gl_VertexID顶点ID,gl_FragCoord它的xy存储片段屏幕坐标、z存储深度坐标,gl_FrontFacing当前是正面还是背面,gl_FragDepth片段只读深度值,gl_in[]接口块数组获取一个图元的所有顶点数据,gl_InstanceID实例化渲染的id
- shader传入数据方式:
- 顶点数据:存储在GPU显存中,通常存储静态数据
- uniform:高速的常量区域(在shader中不可更改),每次渲染前可以被CPU端快速更新,修改性能较高,因此通常存放动态数据,它是全局的,意味着每个shader都可以声明后使用,而不必从顶点传入
- Uniform块布局,定义一系列Uniform变量
- shader之间的输入输出:
- in/out/
- struct,
- 接口块类似于struct,但用in/out定义块,
面剔除
- 逆时针环绕顺序(顶点顺序)为正面,顺反面
- glCullFace函数指定剔除正面/背面/都剔除
- glFrontFace,将逆/顺,指定为正向面
cubeMap
- cubeMap包含6张子纹理
- 天空盒:
- 把cubeMap贴到立方体上,
- 由于相机位于原点,立方体不使用M矩阵,让它始终包裹住相机,中心位于原点位置
- 使用V矩阵,不使用位移变换,使得场景看起来很大,使用旋转,使得立方体可以转动,让我们可以观察四周
- 采样纹理:用方向向量采样cubeMap,方向向量(顶点pos - 立方体中心),由于立方体位于原点(0,0,0),因此直接用位置即可
- 深度,不启用深度测试, 先渲染天空盒,这样不会更新深度缓冲,启用深度测试,再渲染场景,这样天空盒显示到场景的后面
- 优化性能:
- 最先渲染天空盒,那些被场景遮挡的天空盒片元,需要做不必要的fs计算
- 后渲染天空盒,但由于立方体的深度比绝大多数的片元都要近,立方体会覆盖图像大部分区域,为了解决这个问题,让vs中z=w,在透视除法中,透视除法到NDC空间中z/w = 1.0即深度值,深度值永远是最大的,这样只会让通过深度测试的天空盒片元进行fs计算,避免的大量不必要的计算
- z=w不会形变:因为变换最终目的是投射到2D平面,也就是只关心xy,z是物体的深度值,将深度值设置为1,不会影响投射的形状,并且由于位于立方体内部,不会发生立方体面重叠现象
- 使用场景:
- 天空盒
- 点光源阴影
- 基于图像的照明:LBL
- ……
几何着色器
- vs和图元装配、fs阶段间的可选阶段gs,可以接受图元装配的完整图元,对每个图元的顶点增删改处理
- gs中需要指定装配的输入图元类型(点/线/三角形),指定gs的输出图元类型,指定max_vertices最大可以绘制的顶点数量,如果超过它将不会绘制
- glDrawArrays图元装配的图元类型是这个函数指定的
- EmitVertex发出顶点
- EndPrimitive发出图元
- 做不同处理
- 定义每个顶点自身的顶点属性
- 爆破物体:
- 利用gs:每个顶点往自己的法线方向移动一段距离,顶点位置 + 法线方向指定长度的向量
- 三角形的法线方向:(p0 - p1)叉乘(p2 - p1),注意向量叉乘的顺序会影响结果向量的方向
- 法线可视化:
- 正常渲染场景
- gs:再次渲染场景,接受物体顶点数据,让每个顶点往法线方向新增点变为线
SSAO
- 环境光在blinn-phong中我们定义为常量,但是现实中,环境光并不是一成不变的,比如墙角这些地方,由于被临近几何体遮蔽的比较多,使得很难接受光线和流失光线反射到人眼,看起来会更暗,也就是对于空间中每个点,如果遮挡量越大,环境光应该越小
- AO环境光遮蔽:关键问题是如何求得遮挡量?如果根据真实的几何体数据来确定遮蔽量,技术上非常困难,又要消耗大量性能
- SSAO屏幕空间环境光遮蔽(是光栅化实现环境光的一种方式),根据屏幕空间的深度值来确定遮挡量,通过采样法在采样范围随机采样,比较采样点深度值和深度缓冲深度值,计算遮挡值,根据遮挡值决定环境光大小
- 流程:
- 几何处理阶段:将场景数据存放到G缓冲,包括世界位置,线性深度,法线,噪声纹理……
- SSAO阶段:
- 采样范围:
- 球体:对于墙面,由于一半的球体内采样点都被遮蔽,因此它看起来也很灰
- 法线方向半球:对于墙面,整个半球内采样点都未被遮蔽,不会降低环境光照值
- 样本生成:
- 样本数:太低会得到波纹效果,如果太高会极大消耗性能,通过引入随机性采样,将会以有限样本数量得到高质量的结果
- 采样算法:
- 确定采样方向:v.xy的随机值在-1——1之间,z在0——1,这样保证了采样方向不朝半球下,结果归一化,这样保证只关心方向
- 确定采样长度:scale为0——1,0——1保证不会超过半球范围,scale根据采样点索引确定,这样index越大距离原点越远
- 有偏采样:现在采样点在半球体内均匀分布,让它们更靠近原点位置,改变scale为scale * scale形成非线性变化,绝大部分缩放值都接近于0即原点
- 随机核心转动:
- 如果为每个片段都生成自己的采样核,极大消耗性能
- 如果对每个片段都应用上述随机生成的采样核,又重复性极高
- 因此我们让每个核心绕z随机旋转,这样既不浪费性能,又提高了画面表现
- 但如果让每个核心绕z随机旋转,也会极大消耗性能,因此创建4*4的噪声纹理,让它重复平铺在屏幕,根据片元对应采样获取的噪声值,转动自己的核心
- 采样噪声纹理:屏幕宽高/纹理宽高,表示在宽高纹理重复了多少次,这样保证纹理大小不被缩放,均匀重复平铺
- 变换到法向半球:
- 为每个片元计算切线空间
- 由于G缓冲,我们知道法线方向,N可以确定
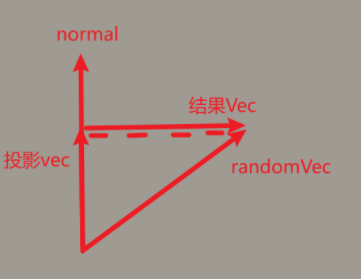
- Gramm-Schmidt处理:randomVec - normal * dot(randomVec, normal),randomVec - randomVec在normal上的投影向量,获得垂直于normal的向量,并且方向是randomVec的方向
- 根据NT叉乘确定B
- 将每个sample*TBN,变化到世界切线空间,+fragPos 移动到片段的世界位置上
- 计算遮挡值
- 将每个sample *P(在几何阶段vs中做了MV变换,这里只需P)变换到NDC空间,再变换到0.0 - 1.0的值域,利用xy坐标采样深度纹理深度值(不用拉伸到屏幕空间,屏幕坐标超过0.0 - 1.0范围了)
- 让采样的深度值和sample.z比较,这两个深度值都是视图空间的,也就是线性深度值,如果sample.z更大,说明sample被几何体遮挡,occlusion += 1,否则occlusion += 0
- 优化范围检查:
- smoothstep(0.0, 1.0, radius / abs(fragPos.z - sampleDepth));
- 如果片段在视图空间的位置和采样的位置差距过大,则不应该产生影响
- 距离差值越小,贡献值越大,距离越大,贡献值越小
- smoothstep(0.0, 1.0, radius / abs(fragPos.z - sampleDepth));
- 最后:每个采样点遮挡值求和/采样次数 取均值,即获得片段的遮挡值
- 采样范围:
- 环境遮蔽模糊阶段:对上个阶段输出的AO纹理,进行简单模糊处理,取周围像素颜色值的均值作为当前像素颜色值
- 光照处理阶段:渲染场景,从AO纹理采样AO值 * 环境光照值
games101和opengl约定差异
- Games101
- View坐标:右手系
- NDC:右手系
- nf定义: 0 > n > f,即负数
- w:z
- opengl
- View坐标:右手系
- NDC:左手系
- nf定义:和相机距离值,即0 < n < f,均正数,如果在相机后方,则为负数
- w:-z
- 因此
- 正交矩阵:由于NDC区别,第3行符号相反
- 透视矩阵:由于NDC区别,第3行符号相反,由于w符号差异,整体4行符号再取反
- 取值范围:由于w符号差异,对于Games101 w=z,由于从原点看-z轴,z为负,因此取值为(w,-w)要取反,opengl来说w为正,则(-w,w)
- 深度值:由于NDC区别,Games101:n映射1,f映射-1,压缩到0——1区间,f0n1, 深度值0近1远,因此要取反,opengl:n映射-1,f映射1
- 深度值0近1远:标准规定也就是opengl中,在NDC空间中,n映射-1,f映射1,经过压缩n0f1
本文由作者按照 CC BY 4.0 进行授权