OpenGL复习(测试与混合、阴影)
测试与混合
- 模板测试
- 模板测试也有模板缓冲和模板值,通过clear清楚后所有模板值归0
- 测试时机:发生在深度测试的前一个阶段
- 流程:在drawcall前设置测试规则和模板值如何更新,在模板测试阶段,遍历所有片元,如果模板测试通过,设置保留片元,设置像素模板值,否则丢弃片元,不更新像素模板值
- glStencilMask(0x00);启用写入,glStencilMask(0xFF);禁用写入
- 模板函数:
- 定义测试规则;glStencilFunc(比较方式(缓冲中存储的模板值,和参考值),参考值,掩码(和模板值、参考值在测试前AND运算))
- 定义如何更新模板值:glStencilOp(测试失败时采取的行为,模板测试通过但深度测试失败时采取的行为, 模板测试和深度测试都通过时采取的行为)
- Alpha测试
- 自定义比较规则(alpha< 某值 / uv<0>1),如果满足条件就在shader中执行discard指令来丢弃片元,否则保留片元
- 颜色混合
- 线性混合:新颜色 * 自身alpha值 + 缓冲中颜色 * (1 - alpha)
- 混合函数:设置两个因子值
- 有半透明物体时渲染顺序
- 假设有2个半透明物体ab在前,不透明物体c在后,预期目标3种颜色混合,
- 一下考虑是drawcall 3次,如果要实现半透明立方体,可能要drawcall 6次
- 先绘制所有不透明的物体(假设先绘制ab,计算颜色后绘制c,深度测试的原因,c会直接丢弃)
- 按照从后往前的顺序绘制半透明的物体(如果先绘制a再绘制b,深度测试的原因,b会被直接丢弃)
- 为什么是 Alpha测试,模板测试,深度测试,颜色混合 的顺序
- 代价是依次提升的,测试可以丢弃片元,这样可以获得最好的性能,避免不必要的片元计算
阴影
- 阴影:
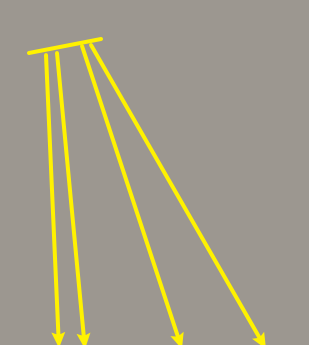
- 形成:光的直线传播沿途经过的物体,后面所有物体被首个物体遮挡,不能被光直接照射,没有光反射到人眼,形成阴影
- 作用:更好体现物体位置关系
- 微积分中的不等式在cg中可以使用,因为cg中只关心近似越等,对于LFcosV 4项积分,可以将V的积分拆分出来,两个函数乘积的积分 ≈ 两个函数积分的乘积,结果和光照结果相乘,这就是shadow mapping的基本思想
- 平行光阴影_实现方式:
- pass1:从光的视角渲染一张深度纹理,和摄像机渲染不同的是使用光的V矩阵(平行光源的位置和方向),使用帧缓冲离屏渲染获得深度纹理
- pass2:从摄像机视角渲染场景,根据之前渲染的深度纹理,由于fs中实际不需要我们自己对每个片段做计算(opengl内部实现插值做计算),和vs一样仍只需要考虑每个顶点,我们可以根据顶点数据MVP变换、/w,获得顶点在NDC光空间位置,使用的深度值是NDC空间的,比较点在光NDC空间的z,和经过视口变换得到的uv坐标获取深度值,如果>这个深度值,表面点处于阴影中,否则不在阴影中(本质就是转换到同一空间下比较)
- 阴影失真
- 摩尔纹(通常是带有条纹的纹理,形成干扰图案,比如弧形、螺旋线……)
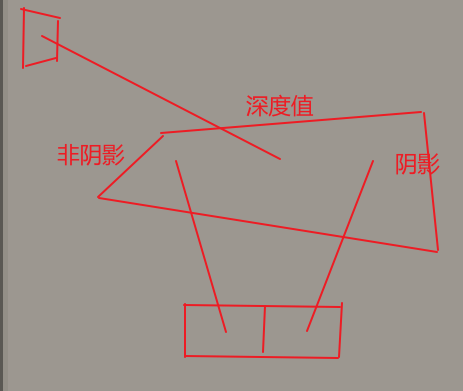
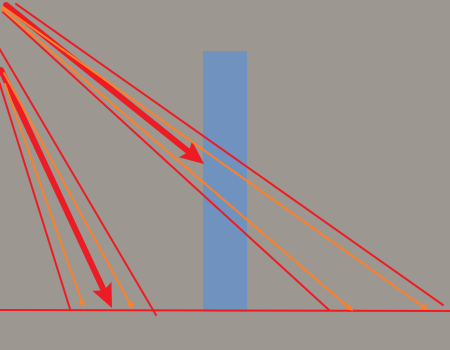
- 成因:一个深度贴图像素的范围,会覆盖场景的一片区域,而这片区域统一使用像素中心采样点的位置计算深度值(重心插值),而颜色缓冲像素采样点变换到3D场景位置,不一定位于深度贴图像素采样点投射的位置,相邻的颜色缓冲像素有的判断为阴影,有的判断为非阴影,出现黑白交替
- 特点:通常出现在非阴影区域,因为深度值差异较小,而阴影区域深度值差异较大
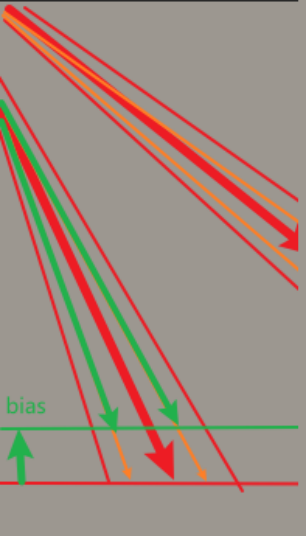
- 解决方式:阴影偏移,对当前NDC.z深度-偏移值,让表面看起来比实际位置更高一点,这样很大一部分错误的认为深度更高的位置会得到正确的结果
- float bias = max(0.05 * (1.0 - dot(normal, lightDir)), 0.005);
- 动态偏移:越垂直于光线的表面,应用偏移越小,角度差异越大的表面,应用偏移越大,这是因为越垂直,像素覆盖的区域就越小,如果偏移过大会产生不正确的结果
- 悬浮
- 成因:物体被遮挡形成阴影,如果这个遮挡物体的深度和被遮挡物体的深度差异不大,那么应用较大偏移后,在深度差异不大的位置,原本应该形成阴影,但错误的判断为非阴影
- 阴影边界
- 成因:超出光平截头体的范围,默认被判断为阴影,就会在场景形成明显边界
- 解决方式:修改深度贴图的环绕方式,并判断如果深度值超过1,返回阴影值0(没有阴影)
- 摩尔纹(通常是带有条纹的纹理,形成干扰图案,比如弧形、螺旋线……)
- PCF阴影抗锯齿
- 成因:当阴影贴图分辨率较低,多个屏幕像素和同一个深度值比较,有一部分区域像素位于阴影,有另一部分像素位于非阴影,就会形成明显的区块划分即锯齿边界
- 解决方式:PCF,为了产生柔和的过渡,一个屏幕像素的采样,不仅仅依赖于一个深度贴图像素,还依赖周围8个像素(3*3-1),把结果取平均值
- 线性深度
- 透视投影的深度值是非线性,应该转变为线性深度值,使得远近精度统一
- 点光源阴影——实现方式:
- pass1:
- 准备6个方向的V矩阵,和cubemap
- 正常来说需要6n(n为物体数量)次drawcall每次渲染到立方体贴图的一个面上,但这样非常耗费性能
- gs:使用gs把顶点变换到6个光空间,这样只需要n次drawcall渲染到6个面上,将一个图元的3个顶点变换为18个,for18次,转换到6个光空间下,通关gl_Layer它指定EndPrimitive送到立方体贴图的哪个面
- pass2:从摄像机视角渲染场景,现在使用片段(根据顶点坐标插值获得)和光的方向向量采样深度值(世界空间的线性深度),由于是0——1范围的,将它*far变换到世界空间,和片段和光距离比较
- pass1:
- PCF:
- 由于现在变为点光源,PCF的过滤应该变为3个维度(4*4*4 = 64次),这非常消耗性能
1 2 3 4 5 6 7 8
vec3 sampleOffsetDirections[20] = vec3[] ( vec3( 1, 1, 1), vec3( 1, -1, 1), vec3(-1, -1, 1), vec3(-1, 1, 1), vec3( 1, 1, -1), vec3( 1, -1, -1), vec3(-1, -1, -1), vec3(-1, 1, -1), vec3( 1, 1, 0), vec3( 1, -1, 0), vec3(-1, -1, 0), vec3(-1, 1, 0), vec3( 1, 0, 1), vec3(-1, 0, 1), vec3( 1, 0, -1), vec3(-1, 0, -1), vec3( 0, 1, 1), vec3( 0, -1, 1), vec3( 0, -1, -1), vec3( 0, 1, -1) );
展开
- 优化:三维泊松圆盘采样,是经过精心挑选或生成的,以确保它们在球体表面上分布得相对均匀, 并且用较少的采样提高性能
本文由作者按照 CC BY 4.0 进行授权