Games202(4·第7、8、9章)
第7章
PRT预计算辐射传输
渲染方程 = ∫ L F cos V阴影可视项 d
PRT的核心思想是利用sh函数对渲染方程大量预计算,以便加快运行计算速度
ptr将渲染方程分为两部分:light光照: L 和 light transport光照传输: FVcos
重要定理:两个函数的product integral乘积积分 ≈ 两个函数积分的乘积
Diffuse
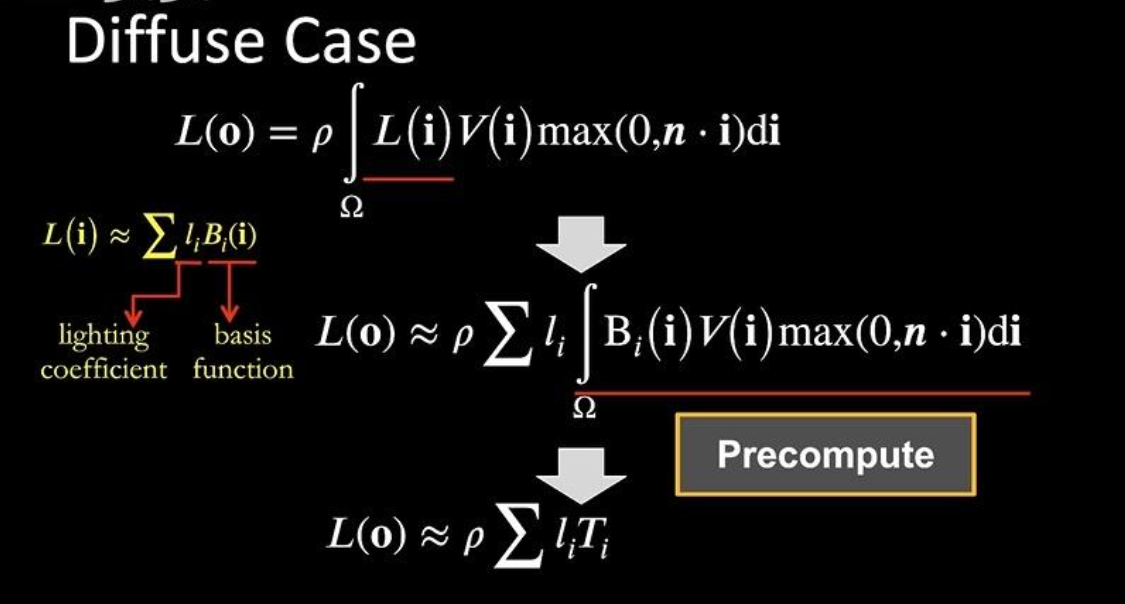
漫反射F项为常数,因此可以提取出来,L项用sh函数表示(投影这一步L(θ,φ)根据环境贴图采样求得(不同法线方向输入,对应不同的系数,运行时获取)),li系数提取到积分外前面加Σ,light transport项作为系数,Bi作为基函数,这是投影操作(V(θ,φ)从采样方向发射射线,如果和场景有交点则说明被遮挡,否则未被遮挡,cos项已知p点法线和采样方向可以求解),获得浮点值,转换为LT点乘求和
由于以上都是预计算,因此只适用于静止场景和静态光源(环境贴图)
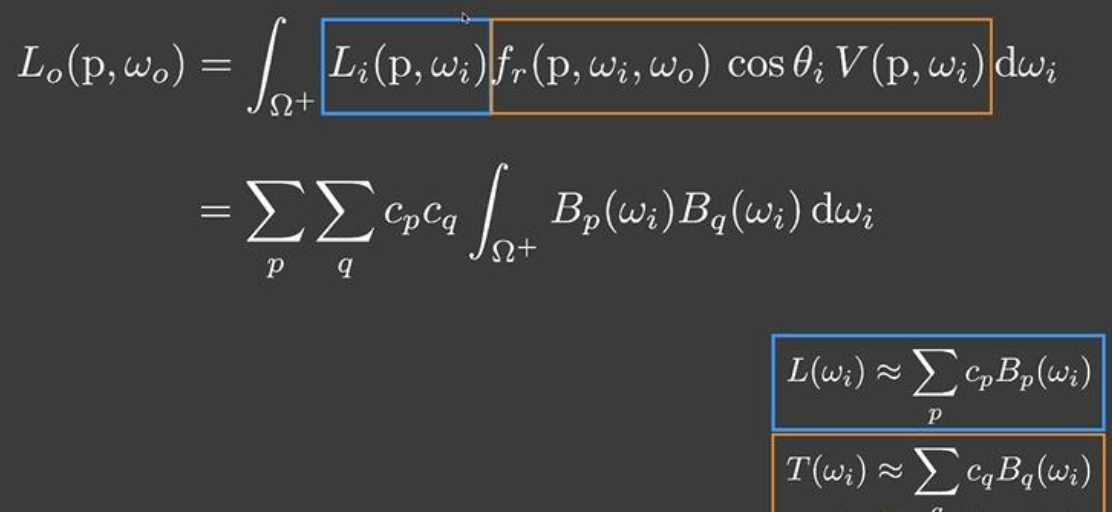
另一种表示方式,把light项和light transport项,都sh重建,(∫ (Σ L_i*Y_i(ω)) (Σ T_j*Y_j(ω)) ),由于前面有积分,因此Lo ≈ Σ_i Σ_j L_i T_j ∫ Y_i(ω) Y_j(ω) dω,即嵌套求和
复杂度为n^2,n为项数量,由于标准正交性(当 i = j 时为 1,否则为 0),因此只有对角线上有值,因此复杂度为n
Specular
p项并非常量,不可以提取到积分外,且依赖于视角v==o
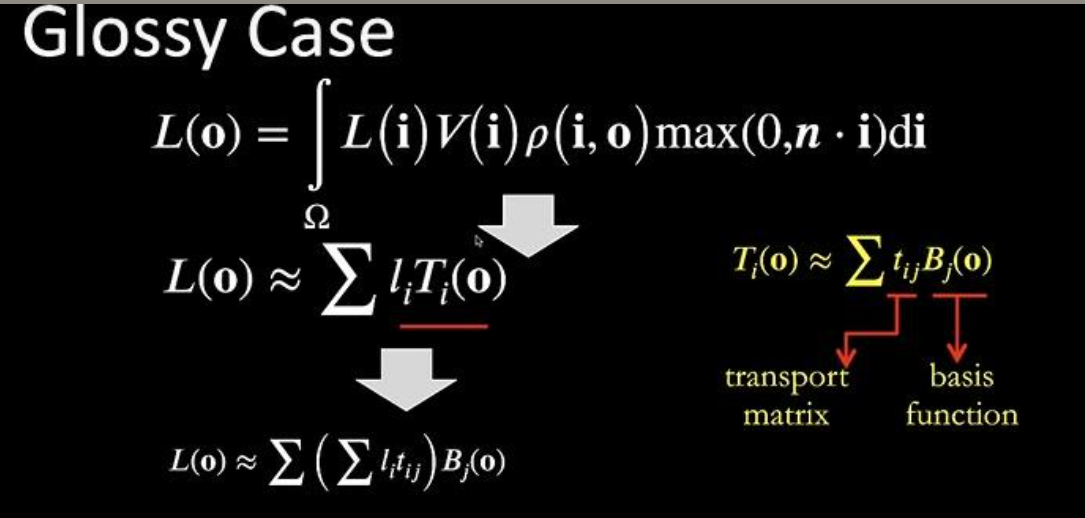
light transport项用sh重建(系数:Vcos项和上面一样求解,对于F(θ,φ)依赖于wi、wo,就像wi一样可以离散采样wo,预生成二维数据),由于light transport项依赖于(ω_i(θ,φ), ω_o(θ,φ)),投影得到系数不在是一维的(仅依赖wi),变为二维(wi,wo),这会产生巨大的存储和花费更多预计算时间
以4阶为例,共16项,对于漫反射,L项16个系数 * LT项16个系数,对于镜面反射,L项16个系数 * LT项16*16个系数矩阵
RSM反射阴影贴图
首先计算直接光照,间接光照采用以下计算方式:
哪些作为VPL
将所有被光源直接照亮的点作为VPL次级光源,可以使用shadow map,它每一个像素作为一个VPL
假设
假设所有的VPL都是diffuse的,为了不依赖于观察方向v
贡献值
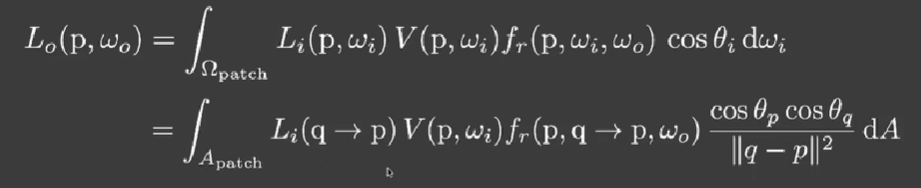
一个VPL即q对p的贡献值:(使用的光线追踪向光源有偏采样的思想)
由于VPL实际很小,我们通常不用积分,直接把它当作一个点q
由于假设条件,因此fr是常数,可以提取到积分外
VPL接收的能量E在pq方向出射的辐射率:fr * φ/dA(辐射照度E),作为对p点的贡献能量li

把li带入渲染方程,dA会抵消掉,将剩余的φ和cos项组合为EP
这样EP与剩余部分(F,V)结合,求得一个VPL对p点着色结果
对于V项如何求?常规思路是为每个次级光源按照pq方向算一次shadow map,比较深度值和pq的距离,但这样复杂度太高了,也没有什么好的方法,因此忽略V项
对所有VPL进行上述计算,获得最终的p间接光照结果
贡献权重
每个p点(shadow map所有像素)和每个VPL做上述计算,复杂度太高了
实际上并非所有VPL都会对p有贡献,比如V中间有阻挡物,pq方向在p的法向半球下,距离太远
因此为了加速这一过程,将p投影到shadow map上,从它的附近采样VPL,采样点离投影位置越近越多
往外采样数越少可能会带来的问题,引入权重值,越近权重越小,越远权重越大
数据存储
在shadow map每一个像素中都需要存储VPL的相关信息比如:深度值,世界坐标,法线,反射光功率(利用MRT)
第8章
LPV光传播体积
它快速且高质量
steps步骤:
- 首先计算直接光照,间接光照采用以下计算方式:
- 划分(将场景划分为若干个3D网格,每个网格叫做Voxel体素)
- 生成(同RSM一样利用Shadow Map找到所有VPL,可以进行采样简化光源数量)
- 注入(将VPL注入到3D网格,一个格子内可能包含许多不同朝向的VPL,把它们合并得到总VPL,可以看作球面函数用sh表示(通常用2阶也就是n==4个项))
- 传播(迭代网格中传播radiance,分为6个(上下左右前后)可能方向,不考虑倾斜)
- 渲染(找到p对应的网格,获得所有的radiance,对p点渲染)
问题:
漏光:不应该被照亮的地方被照亮,解决方法是将网格划分较小,但是导致计算速度慢
Cascade层级加速结构可以优化LPV性能
VXGI体素全局光照
steps:
首先计算直接光照,间接光照采用以下计算方式:
- light pass:
- 划分(将场景划分为若干个3D网格,每个网格叫做Voxel体素)
- 生成(同RSM一样利用Shadow Map找到所有VPL,可以进行采样简化光源数量)
- 注入(不同于LPV的合并,通过表面材质来准确的算出出射的分布,因此可以支持glossy的LPV,并且比LPV更准确)
- camera pass:
- 传播(从相机向每个pixel方向发出ray,根据交点材质获得反射方向,如果是glossy(diffuse和specular之间)打出一个锥形区域,diffuse打出若干个锥形区域)
- 渲染(锥形按照空间层级查询,如果与voxel相交,则将它对p的贡献算出来)
SSAO屏幕空间环境遮蔽
详见其他章节
第9章
SSDO屏幕空间方向遮蔽
DO是对AO的升级,它考虑了间接光照的颜色信息
是否光照计算:未被遮挡,就会对p提供间接光照
渲染:采用RSM中VPL的信息对p点着色,着色公式和RSM的公式一样
问题

2·存在丢失信息问题:比如墙面侧对着我们,墙面正面为黄色,应该对附近地面产生影响,但由于判断问题,采样点均未通过深度比较,因此丢失了光照信息
SSR屏幕空间 反射/光线追踪
它和光线追踪的思想比较像,在延迟渲染的几何阶段后,我们知道p点(某片元)信息,包括法线方向,我们也知道向此片元方向投射即入射方向,那么可以求出反射方向
利用raymatching找到反射光和3D场景的交点,但这里不必在3D场景计算(利用sdf),而是依据外壳信息(深度信息),在屏幕空间找到3D空间对应的交点,利用此交点(像素)数据,去计算对p点的间接光照贡献
固定步长
以固定步长前进,每次比较和壳的深度差异,如果>壳停止步进,否则继续步进
精度取决于步长大小,步长越小越精准,同时计算量也越大,为了解决步长问题,引入了动态计算步长的方法
动态步长
为场景的深度图,生成mipmap,但它的像素并非存储上层的四个像素平均值,而是最小值,
它的思想和空间加速结构一样,本质上都是快速跳过不相交的空间,如果和上层节点不相交,那么也不会和子节点相交
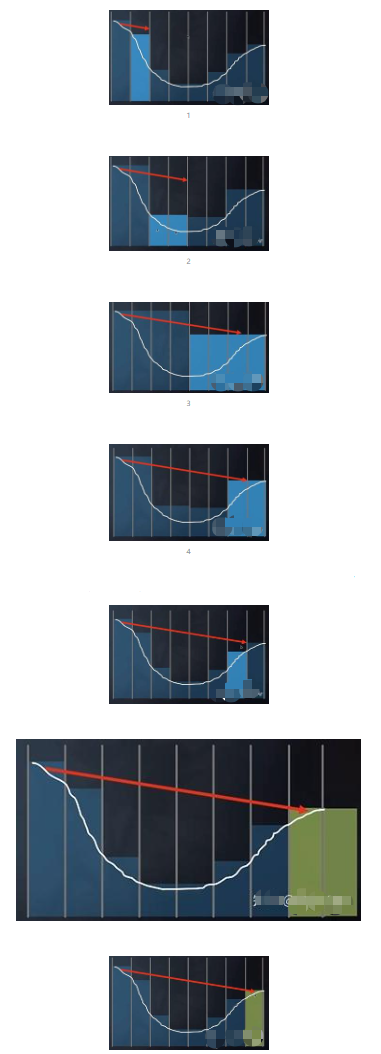
一维情况:
没有交点(ray深度值>像素深度值),level++,光线前进当前level的像素大小的长度
有交点,level–
如果levelmax上没有交点,level不继续增加
如果ray超过了屏幕范围,则步进结束
如果level0上有交点,则步进结束
问题
和其他屏幕空间实现GI一样,它也会出现信息丢失问题