Games202(3·作业1,第6章)
作业1
首先作业框架为我们绘制了场景,但是无阴影效果:
这是包含阴影的PBR 公式: V + L + B

框架解析:
- engine.js: 新增了一个人物模型,1个地面模型
- webglrender:
- 新增了shadowMeshes数组
- render中,变为了两次pass,首先为场景(使用阴影材质)渲染阴影mesh,然后为场景渲染颜色
- 平行光:(本次使用平行光而非点光源作阴影)
- 网格体
- CalcLightMVP: 返回光源的MVP
- shadow材质 继承主材质:
- 包括FBO的帧缓冲区,为了存储阴影相关数据的,
- 包括lightMVP 光视角的MVP
- 函数: buildShadowMaterial 构建阴影材质
- FBO.js,这个类的构造首先创建帧缓冲和设置属性,创建纹理和设置属性,纹理和缓冲关联,以及错误检查,解绑
- shadow glsl:(为场景渲染一张深度图)
- pack函数的作用是把一个(0,1)的float值储存到RGBA四个通道中
- gl_FragCoord是内置的视口变换后的坐标:其大小范围是x:[0, ScreenWidth],y:[0, ScreenHeight],z:[0, 1],返回它即返回深度值
JAVA语法
constructor(){ super(……); } 是构造函数,super部分是调用基类构造函数
阴影steps:
- 将world pos(经过model)* LightMVP矩阵变换到光空间,获得NDC[-1,1]标准化设备坐标
- 为了获取在光屏幕下的纹理坐标,通过/w(视口变换)-> 在+1/2映射到[0,1](因为纹理是0,0->1,1)
- 判定阴影:根据 当前depth(纹理坐标.z) >= map保存的值(texture2D采样),就返回0判定为阴影,否则返回1
普通阴影:
- 修改CalcLightMVP函数,
- 写出light MVP矩阵,
- 根据传入进来的参数SRT,构建Model矩阵,
- 根据光源属性构建view矩阵,
- 根据视锥体的左右上下近远,创建投影矩阵
- 完善glsl中的useShadowMap函数,
- 查询当前着色点在ShadowMap上记录的深度值,并与转换到light space的深度值比较后返回visibility项,
- 首先获取阴影贴图中的值,获取当前的深度值,如果当前 >= map保存的值,就返回0判定为阴影,否则返回1
- 修改phong glsl中的main
- 首先获取SM上的纹理坐标
- 调用useShadowMap返回visibility的值
- 让最后颜色返回gl_FragColor = vec4(phongColor * visibility, 1.0);
自遮挡:
有两种方法解决子遮挡,我们用自适应的方法
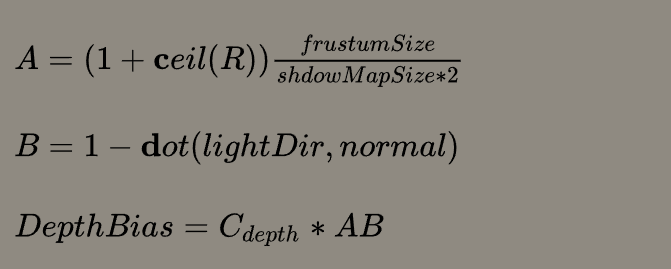
根据这个公式,我们添加一个getShadowBias函数,如图所示,
- A = (1 + 取整(在uv上的过滤半径大小))* (平截头体大小 / (阴影贴图大小 * 2))
- B = 1 - dot(法线,光线方向)
- Bias = 常数 * AB
修改useShadowMap函数,cur_depth - bias >= depth

pcf:
让shaderpoint和shadowmap一圈的范围比较,获取平均值
- 写fs中的pcf函数,
- 为了优化性能,使用poissonDiskSamples生成随机种子保存在poissonDisk数组中,作为offest位置,采样NUM_SAMPLES指定次数次,最后+=求和的结果求平均值,
- 其中filterRadiusUV过滤半径取:FILTER_RADIUS / SHADOW_MAP_SIZE得到uv(0–1)中的大小
- 这里有一点注意的地方,useShadowMap()应放在pcf()的上面,否则会调用失败
pcss:
步骤如下:
- STEP 1: avgblocker depth,找到平均block深度在findBlocker()中计算
- 首先确定在shadowmap中应该采样的区域,它和3个参数有关
- 光的大小(越大,block范围越大)
- 近平面距离shaderpoint的距离(距离越远,block范围越大)
- 光到shaderpoint的距离有关(距离越远,block范围越小)
- 然后在此范围内像pcf一样随机采样,取block平均值
- 首先确定在shadowmap中应该采样的区域,它和3个参数有关
- STEP 2: penumbra size,根据课上的公式计算penumbra过滤系数(即filterRadiusUV)(其实可以理解为,近处pcf程度低,远处pcf程度高)
- float penumbra = (zReceiver - avgBlockerDepth) * LIGHT_SIZE_UV / avgBlockerDepth;
- STEP 3: filtering,调用pcf函数即可,使用penumbra过滤系数,对pcf的过滤范围缩放,也就是penumbra的值越大,取样的offest越大,从而形成更模糊的效果
可以看到随着 遮挡物和被投射物的距离越远,越趋近软阴影

模型旋转:
首先设置rotate的初始值和需要传输和调用的参数
*//数据修改
- 在engine
- setTransform函数中添加模型变换_旋转部分,这是修改顶点数据(负责初始时应用的旋转)
- Add mesh中设置模型旋转初始值
- Mesh.js中也加入旋转,以便可以接受模型的初始旋转变换
- MeshRender.js中CameraParameters中添加旋转,要让相机接受模型的旋转数据
- //平行光MVP
- DirectionalLight.js
- 修改灯的顶点数据,虽然灯不用变换位置,但灯也用到了setTransform参数需要传入参数
- 也需要更改CalcLightMVP生成的光照矩阵,添加rotate部分, 以便传入模型的mvp
- //材质
- PhongMaterial
- 构造添加rotate参数,因为在这里会调用CalcLightMVP
- buildPhongMaterial也添加rotate参数
- 同样在ShadowMaterial中也如PhongMaterial
- loadOBJ.js中调用创建材质时,传入参数
实时:
为了随时间增加旋转角度,需要在mainloop中获取deltatime: 然后在render中接受时间,并让网格体旋转矩阵
实时阴影
SM的渲染正是在渲染更新中,因此是每帧都会重新渲染
可以看到模型在旋转,模型旋转我们更改了顶点数据,以及glsl中的model矩阵
但阴影没有变,是因为我们没有向shadow glsl中传入旋转后的模型,
光源旋转
- 灯光要实时旋转,还要更改灯光的MVP,
多光源
- 首先为光源添加lightIndex编号
- 在engine中创建新光源
- 在WebGLRenderer中,需要将所有光源渲染结果叠加,要开启混合gl.enable(gl.BLEND);
第6章
勒让德多项式
- 代数式:由字母和数字组成,并由运算符号连接的式子
- 单项式:由数或字母的积组成的代数式
- 多项式:有限个单项式的线性组合
- 正交多项式:将单项式乘积进行积分时,如果它们相同,结果为常量,如果它们不同,结果为零
- 勒让德多项式
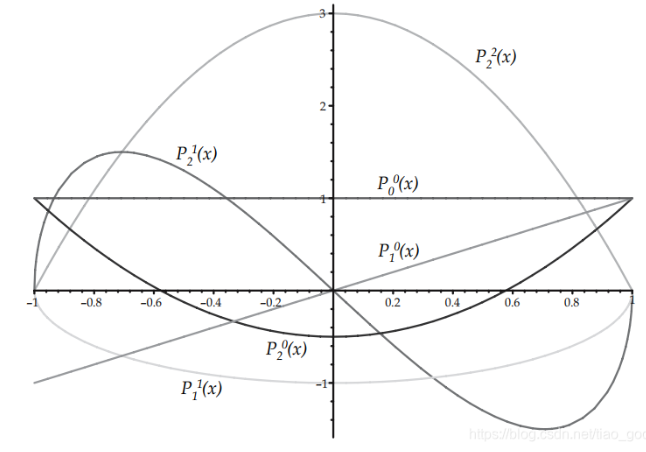
- 用于将定义在[-1,1]区间函数fx展开,它同傅里叶展开一样都是正交多项式
- m: 次数,整数,满足 0 ≤ m ≤ l
- l: 阶数,非负整数
- x: 自变量,在区间 [-1, 1] 内
- 构造勒让德基函数
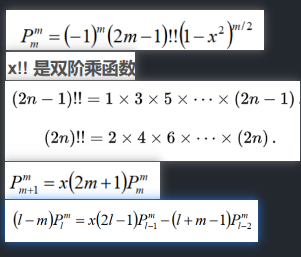
- 求l阶n次多项式(输入m<=l),自变量x时的f(x)值
- 根据公式1首先求Pm^m
- 根据公式2求Pm^m+1
- 根据公式3,滚动数组循环求解(pmm,pmm+1,pmm+2,pmm+3……pml),它依赖 l-1 和 l-2
- 计算勒让德系数……略(这里暂时只关心基函数,没有计算系数,因为在sh中只使用它的基函数)
SH球谐函数
- SH也是函数展开的一种方式,但它的基函数定义在球坐标系中,用于对三维空间中的函数进行展开,比如球面函数(即x定义域为球面)(球面的参数化:用球坐标表示球面上的每一个点)
- 基函数:
- 计算l阶m次,在theta和phi球坐标下的y(θ,φ)
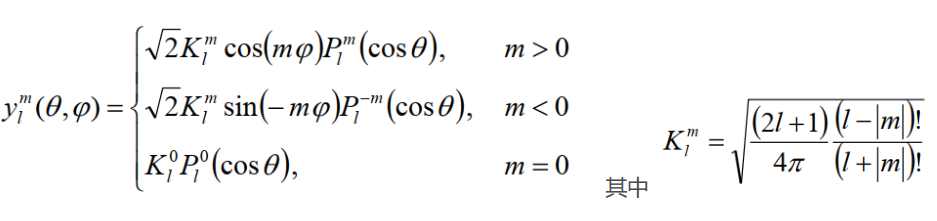
- P:勒让德多项式
- K:规范化函数的比例因子
- l: 阶数,非负整数
- m:次数,整数,[-l, l]
- 基函数可视化:
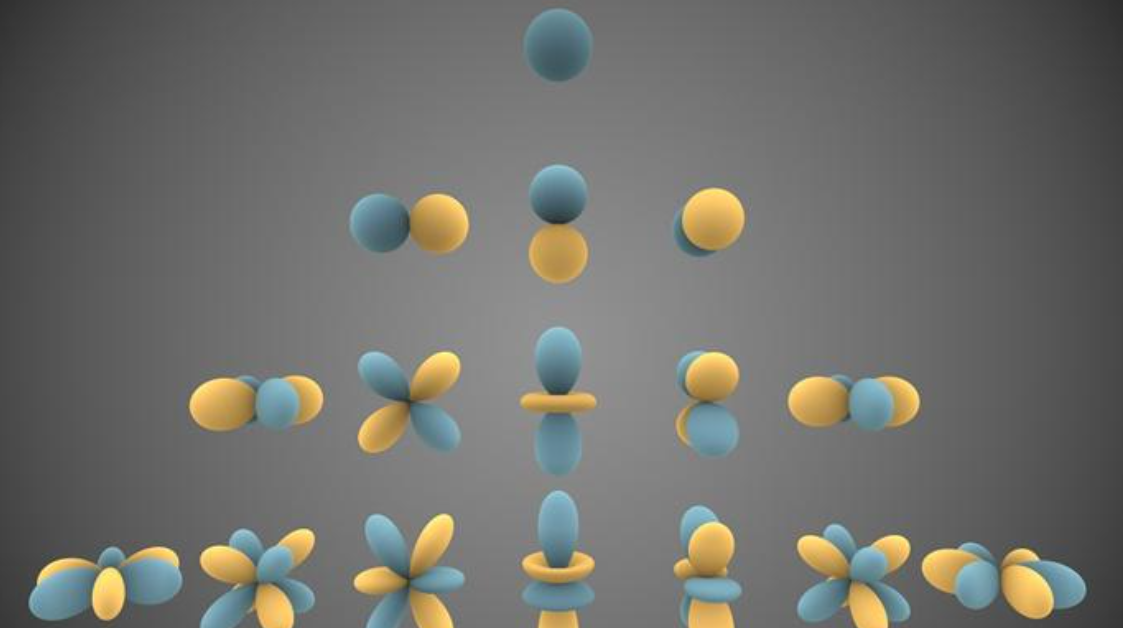
- 当3维SH函数被可视化成几何体时,向每个球坐标采样获得结果值,几何体的形状和灰度由结果值的绝对值确定,表面的颜色由结果值的正负性确定,绿色为正值,红色为负值,
- 投影:
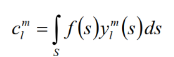
- 投影:计算l阶m次基函数的系数c,将原函数f和sh的l阶m次基函数积分,积分域取决于f的定义域,比如球面函数的定义域为球面
- 示例:
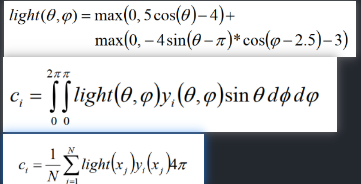
- 原函数light
- 系数ci为l和y的积分,积分域为球体,sin:赤道附近的片段比极点周围的片段对最终结果的影响更大
- 解积分:蒙特卡洛:采样使用均匀采样(θ,φ),pdf(1/4Π),则w为1/pdf = 4Π,其中被积函数为l*y
- 重建:
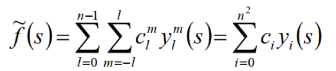
- 重建:每个系数和对应的基函数相乘,再求和,获得原函数的近似函数f`(x)
- 越高阶重建效果越接近,但会带来更大的存储压力、计算压力,甚至摩尔纹现象,通常使用3阶就可以获得99%的效果
- 球面函数可视化:
- 遍历经纬度,count取决于像素ij的数量
- 根据球坐标获取对应的重建值
- 存放到数组对应位置中,以便作为纹理输出
- 特性:
- 标准正交性:
- 如果两个sh基函数yiyj,i为第一个函数的lm对,j为第二个函数的lm对,如果i==j,乘积积分返回1,否则返回0
- 旋转不变性:
- 对原函数fx经过R旋转后获得gx,重建获得gx的系数 == 对原函数fx的系数应用系数旋转矩阵M(n * n)来得到gx的系数,由于基函数不依赖于fx,则旋转后不需要改变基函数,因此不考虑它
- 比如将光源(光源函数==原函数)旋转后,想要获得新的重建的近似函数,并不需要重新计算,系数变换就可以
- 系数旋转矩阵:

- Mij = 每个元素都是通过旋转y与非旋转的y积分来计算的
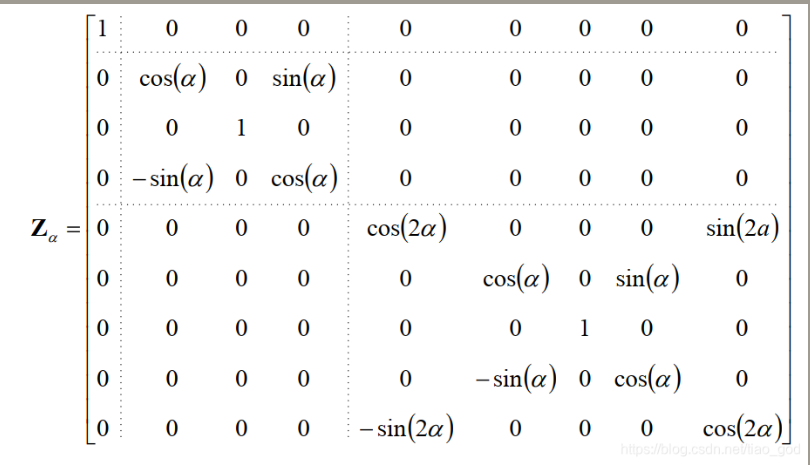
- 这是绕z旋转的2阶旋转矩阵,让gx的系数构成的列向量左乘这个矩阵,即可获得旋转后的系数
- 如何表示任意旋转呢?同欧拉角的思想一样,可以用一系列简单的旋转表示复杂旋转
- 任意旋转可以绕x旋转1次,绕y旋转1次,我们已经有了绕z的矩阵,绕y用xzx表示
- 但上述的计算复杂度特别大,由于矩阵的稀疏特性,我们可以降低它的复杂度,但仍很耗费性能
- 可以预计算,把这5个矩阵相乘组合,获得统一的矩阵,从而加快运行时计算的速度,但当阶数高时,表达式会变得极其复杂和庞大,并且由于使用欧拉角,它会出现万向节锁定问题

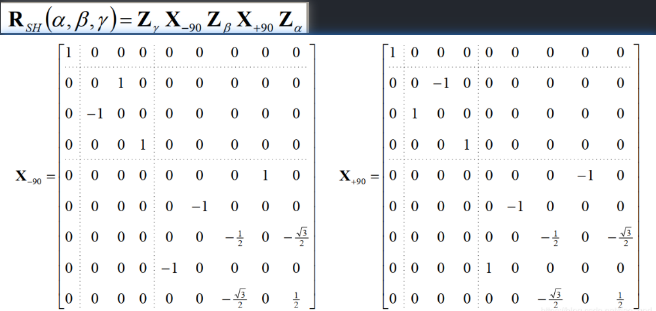
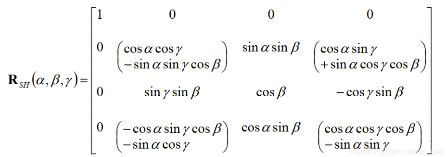
- 有个技巧可以既避免万向节锁死,又可以加快计算速度,我们利用标准3*3三维旋转矩阵的对称性,根据这些恒等式,避免了上面5个矩阵相乘的运算,当sinβ=0时,这个公式就失效了,可以利用下面的R矩阵,以及恒等式
- 标准正交性:
- 标准示例:
- sh核心优势是快速解多个函数的乘积积分,比如渲染方程
- 假设渲染方程有L和V项两项乘积积分
- 普通复杂度为N即采样次数
- 将两函数分别展开,用近似函数表示,两项乘积积分,即每个对应的函数(系数*基函数)相乘,再求和,由于正交性,基函数i==j乘积==1,则可以化简掉,只保留系数乘积,复杂度为M即函数个数个
- SH函数的笛卡尔版本
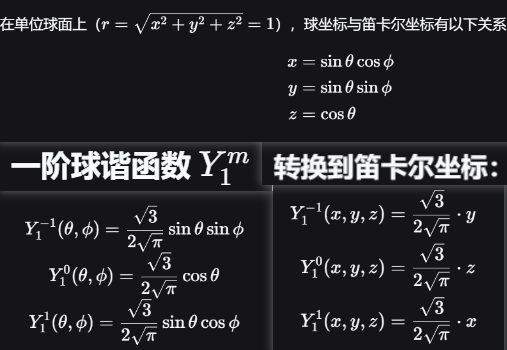
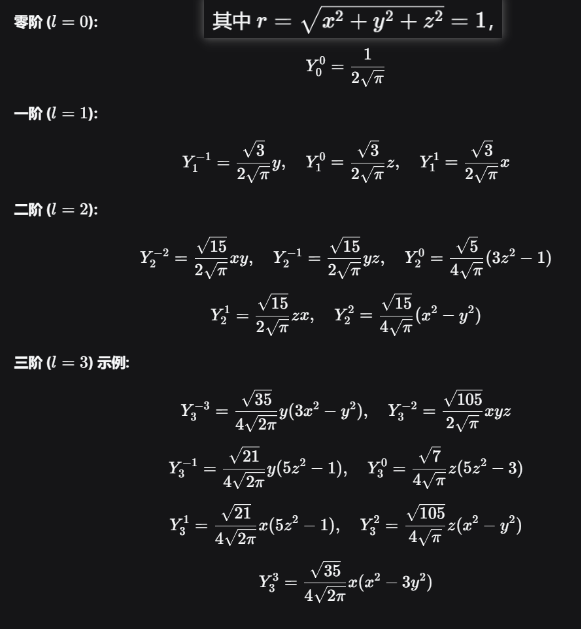
- 从球坐标表示转换到笛卡尔坐标表示,由于基函数不依赖于fx,因此它是固定的,这个为2阶的SH函数的笛卡尔版本
- 这样在3维直角坐标系中一个点xyz,可以投影在上面的基函数,计算sh系数
本文由作者按照 CC BY 4.0 进行授权