VulkanTutorial(16`Depth buffering)
Depth buffering
之前顶点数据一直使用的2D坐标,这次我们使用3D数据,并且我们本次添加多个物体,然后进行深度测试
3D数据
首先修改Vertex结构体,并修改attributeDescriptions的格式 接下来,更新顶点着色器以接受并转换3D坐标作为输入。别忘了以后重新编译它! 最后,更新vertexs顶点实际数据:
多个物体
如果您现在运行应用程序,那么您应该看到与以前完全相同的结果,不过第一个目标已经完成,现在添加另一个四边形 让我们复制四边形顶点数据,然后将它们的z坐标变为-0.5(在下方),再修改indices数组
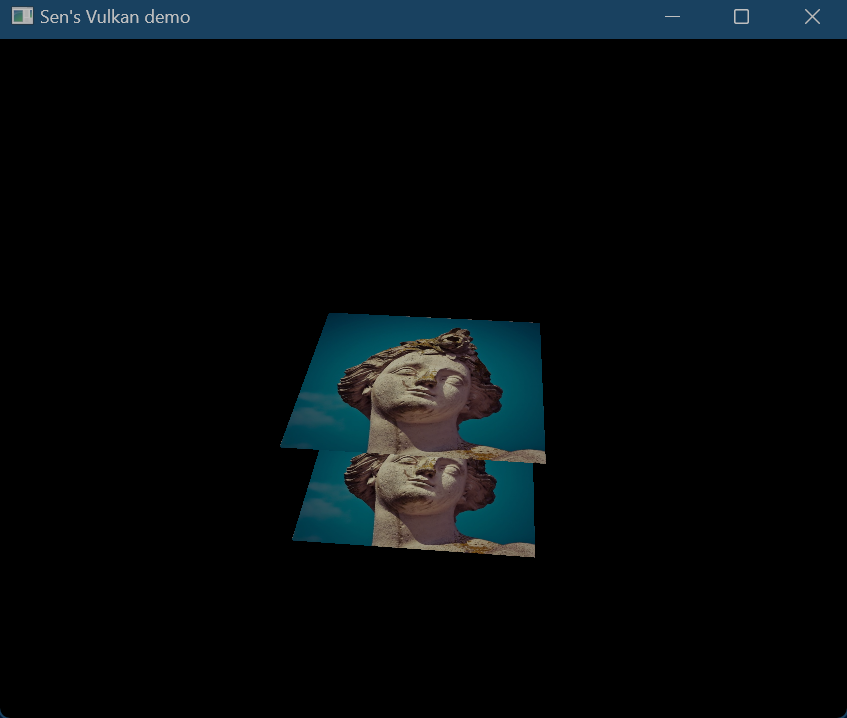
深度测试
现在运行你的程序却发现,下面的方形绘制在上面的方形上方,因为我们后绘制下面的方形,有两种方法可以解决:
- 按深度从后到前对所有绘制调用进行排序(通常用于透明物体,因为如果按照正常深度测试绘制透明物体,深度较大并且后绘制的物体,会因为不会通过深度测试而丢弃,但正常来说,我们想要它显示到其他透明物体的后面)
- 使用深度缓冲区进行深度测试
深度缓冲区是一个额外的附件,它存储每个位置的深度,就像颜色附件存储每个位置的颜色一样
buffer and attachment
对于buffer用于存储和在 CPU 和 GPU 之间传输(mapping)数据,而对于attachment负责输出和资源管理 shader会生成像素数据,并将这些数据写入到指定的attachment中,通过在vkRenderPassBeginInfo阶段绑定到swapchain的FrameBuffer(是一组Attachment(颜色/深度/模板)的集合),因此渲染结果实际上是被写入到了swapchain的image中,在渲染完成后,swapchain会负责将这些包含渲染结果的image按照特定的顺序和时机呈现到屏幕上
GLM
GLM生成的透视投影矩阵将默认使用OpenGL深度范围-1.0到1.0。我们需要使用GLM_FORCE_DEPTH_ZERO_TO_ONE定义将其配置为使用Vulkan范围0.0到1.0。
Depth image and view
Format
和颜色附件一样,深度附件也基于图像,但是我们要手动创建, 深度图像应与颜色附件相同的分辨率,但是要考虑如何指定它的格式,我们不需要从中读取数据,只需要有一个合理的精度
- VK_FORMAT_D32_SFLOAT:深度的32位浮点数
- VK_FORMAT_D32_SFLOAT_S8_UINT:深度和8位模板的32位有符号浮点数
- VK_FORMAT_D24_UNORM_S8_UINT:深度和8位模板的24位浮点数
模板组件用于模板测试,因此我们可以简单地使用VK_FORMAT_D32_SFLOAT格式, 添加一个新的函数findSupportedFormat(),它接受一个候选格式列表,对于每个格式,使用 vkGetPhysicalDeviceFormatProperties 函数获取该格式在物理设备上的特性 检查此特性是否满足特定的 tiling(图像平铺方式:VK_IMAGE_TILING_LINEAR(线性平铺)或 VK_IMAGE_TILING_OPTIMAL(最优平铺))和 features(格式特性标志)要求 从而选择到底使用那种深度图像格式是最好的
image and view
创建新的createDepthResources函数,首先调用findSupportedFormat()找到format,调用已有的createImage创建深度图像,和调用createImageView创建图像视图 但是createImageView函数目前假设子资源总是VK_IMAGE_ASPECT_COLOR_BIT,所以我们需要转动那个字段转换成参数:
renderpass,Framebuffer
我们不需要显式地将图像的布局转换为深度附件,因为我们将在renderpass中处理这个问题 我们现在要修改RenderPass以包含深度附件depthAttachment,还有subpass的reference subpass只能使用一个depthAttachment,因此不用指定类似这样的colorAttachmentCount数量, 更新VkSubpassDependency结构体,引用附件 将depthImageView深度图像绑定到深度附件,还需要将调用移动到JumeFrameBuffers,以确保在实际创建深度图像视图之后调用它
Clear values
我们有多个附件,因此要有对应的VkClearValue,转到recordCommandBuffer并创建一个VkClearValue结构体数组 VkClearValue表明每次渲染前,清除attachment为指定值,在Vulkan中,深度缓冲区中的深度范围为0.0到1.0,其中1.0位于远视图平面,0.0位于近视图平面
Depth and stencil state
在pipeline中新增VkPipelineDepthStencilStateCreateInfo结构体,以便启用深度测试 depthTestEnable字段指定是否应将新片段的深度与深度缓冲区进行比较,以查看是否应丢弃它们 depthCompareOp字段指定为保留或丢弃片段而执行的比较 minDepthBounds和maxDepthBounds字段是用于可选的深度边界测试 并更新VkGraphicsPipelineCreateInfo结构体
Handling window resize
当调整窗口大小时深度缓冲区的分辨率应更改 修改recreateSwapChain函数添加createDepthResources, 修改cleanupSwapChain函数添加vkDestroyImageView