101复习(6`物理仿真)
物理仿真
- 动画:渲染画面连续播放,>30fps
- 关键帧动画:中间帧通过插值技术生成
- 物理仿真:通过各种物理公式,计算网格体的位置/形变,通常和渲染分步实现
- 导数:
- 数学表示:
- f’(x),dy/dx,
- f’‘(x), d²y/dx²,d(dy / dx) / dx
- 物理表示:
- ẋ, dx/dt, 时间t为默认自变量
- ẍ,d²x/dt²,d(dx / dt) / dt
- x位置,ẋ 速度, ẍ 加速度
- 数学表示:
- 质点弹簧系统:
- 一个弹簧左右连接两个质点ab,中间为弹簧,弹簧初始长度l
- 胡克定律: F = k·x k劲度系数(取决于固体材料) ,x形变量
- 弹簧受力分析

- 把弹簧拉长,弹簧处于静止状态,因此ab受力平衡,a受到拉力 == a受到弹力,b受到拉力 == b受到弹力
- 由于弹簧是一个整体,弹簧处于静止状态,因此a受到拉力 == b受到拉力,因此a受到拉力 == a受到弹力 == b受到拉力 == b受到弹力
- 当ab拉力消失,ab不在受力平衡,将向内收缩,收缩过程中势能逐渐转为动能,速度越来越快,当到达原长,势能变为0,由于惯性ab继续运动,压缩弹簧,动能减少逐渐转变为势能,压缩到最大,动能为0,ab反向运动弹簧伸展,这样周而复始弹簧会不断伸缩
- 为了让弹簧停止,需要添加摩擦力项,和ab的速度方向相反
- 但如果将弹簧拉开,并让ab同时向右移动,这时ab摩擦力方向都左,这样并不能让ab恢复弹簧的原长度,仅能让ab不再向右移动

- 所以摩擦力方向应该和相对运动方向相反,对于b来说,看相对a的变化,b受到的摩擦力:
- kd表示摩擦力大小,负号表示和相对运动方向相反
- 括号内点乘决定摩擦力大小的缩放
- 如果相对a项右移动,归一化向量方向向右,速度为向右,同向点乘结果为1,
- 如果相对a项左移动,归一化向量方向向右,速度为向左,反向点乘结果为-1
- 假设b相对a做圆周运动,即b垂直于ab方向移动,虽然ab有速度,但相对弹力没有改变,因此不应该获得ab方向的摩擦力,公式中获得点乘结果为0,正是想要的结果
- 最后的归一化向量,保证结果是向量
- 模拟布料
- 当用弹簧网格模拟布料,会出现两类错误的受力
- 切片力:沿对角线拉伸弹簧会出现形变,而布料不会,可以在两个对角线方向增加较强(布料不会形变)弹簧,当被抻拉受到挤压时可以产生对抗力
- 剪切力:跳格连接较弱(布料仍可以弯曲)弹簧,作为抵抗力
- 当用弹簧网格模拟布料,会出现两类错误的受力
- 粒子系统
- 创建粒子
- 计算每个粒子受力
- 更新每个粒子位置和速度
- 清除粒子
- 单粒子模拟
- 基础概念:
- 速度场:横轴时间,纵轴位置,切线速度方向
- 代数方程:含有未知数的等式,解是常数
- 微分方程:含有未知函数及其 导数的等式,解是函数,常规微积分是“从函数求导数”,而微分方程是“从导数求函数”
- 常微分方程:只有一个自变量的微分方程
- 偏微分方程:含有两个或者多个自变量的微分方程
- 几阶微分方程:最高阶导数是几阶导数
- 问题:dx/dt = v(瞬时速度),已知起始位置x0,导数v,求自变量t对应的因变量x
- 解一阶常微分方程:
- 显示欧拉方法(用t1的位置和速度去估计t2位置和速度)
- 把时间分为一个个小块,比如一个小块t1——t2,t2的位置 = t1的位置 + Δt * t1速度,t2位置的速度 = t1速度 + Δt * t1加速度
- 中点法:(用t1的位置和t0.5的速度去估计t2位置和速度)
- t0.5中点位置 = t1位置 + Δt/2 * t1速度,t2位置 = t1位置 + Δt * t0.5中点速度,t2位置的速度 = t1速度 + Δt * t1加速度
- 自适应:(把一次欧拉分为两次欧拉,如果和一次欧拉方法结果差值 < 阈值,则不用继续分割)
- t0.5中点位置 = t1位置 + Δt/2 * t1速度,t2位置 = t0.5位置 + Δt/2 * t0.5中点速度
- 隐式欧拉(用t2的位置和速度去估计t2位置和速度)
- t2位置 = t1位置 + Δt * t2速度,t2位置的速度 = t1速度 + Δt * t2加速度
- 由于t2速度和t2加速度未知,因此需要解方程组
- 显示欧拉方法(用t1的位置和速度去估计t2位置和速度)
- 解一阶常微分方程:
- 稳定性:
- 局部截断误差:每一步产生多少误差
- 整体误差:局部误差累积
- 欧拉方法是1阶方法,即局部截断误差为Δt^2,整体误差Δt, 随着Δt减小,误差会减小
- 龙格库塔方法:(用来解常微分方程)
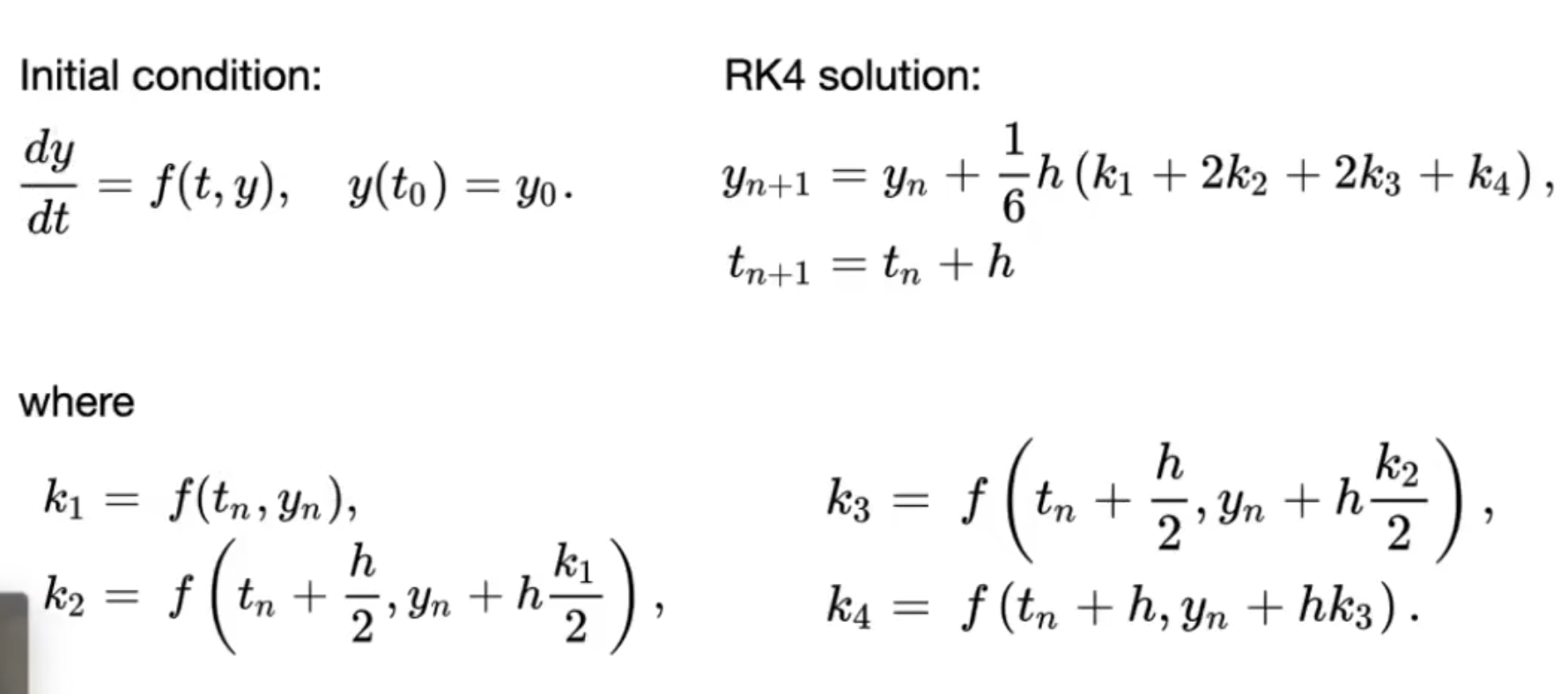
- 4阶方法,因此误差很小
- 公式里面的y可以换成上面x位置,n表示帧,h表示Δt,f(t,y)替换成f(t,x)速,k1k2k3k4系数
- 基础概念:
- 刚体模拟
- 刚体:指在运动中和受力作用后,形状和大小不变,而且内部各点的相对位置不变的物体
- 流体模拟
- 流体:流体是指在微小剪切力的持续作用下能够连续变形的物质
- 质点法:
- 用很多刚体小球表示
- 假设水不可被被压缩,那么任何一刻任何一个位置都可以知道密度,如果有密度和正常时刻密度不一样,就需要通过移动小球位置来修正密度
本文由作者按照 CC BY 4.0 进行授权